快速开始
开机与连接
开机
注:开机前,确认手持急停、背部急停及移动平台急停处在非触发位置 
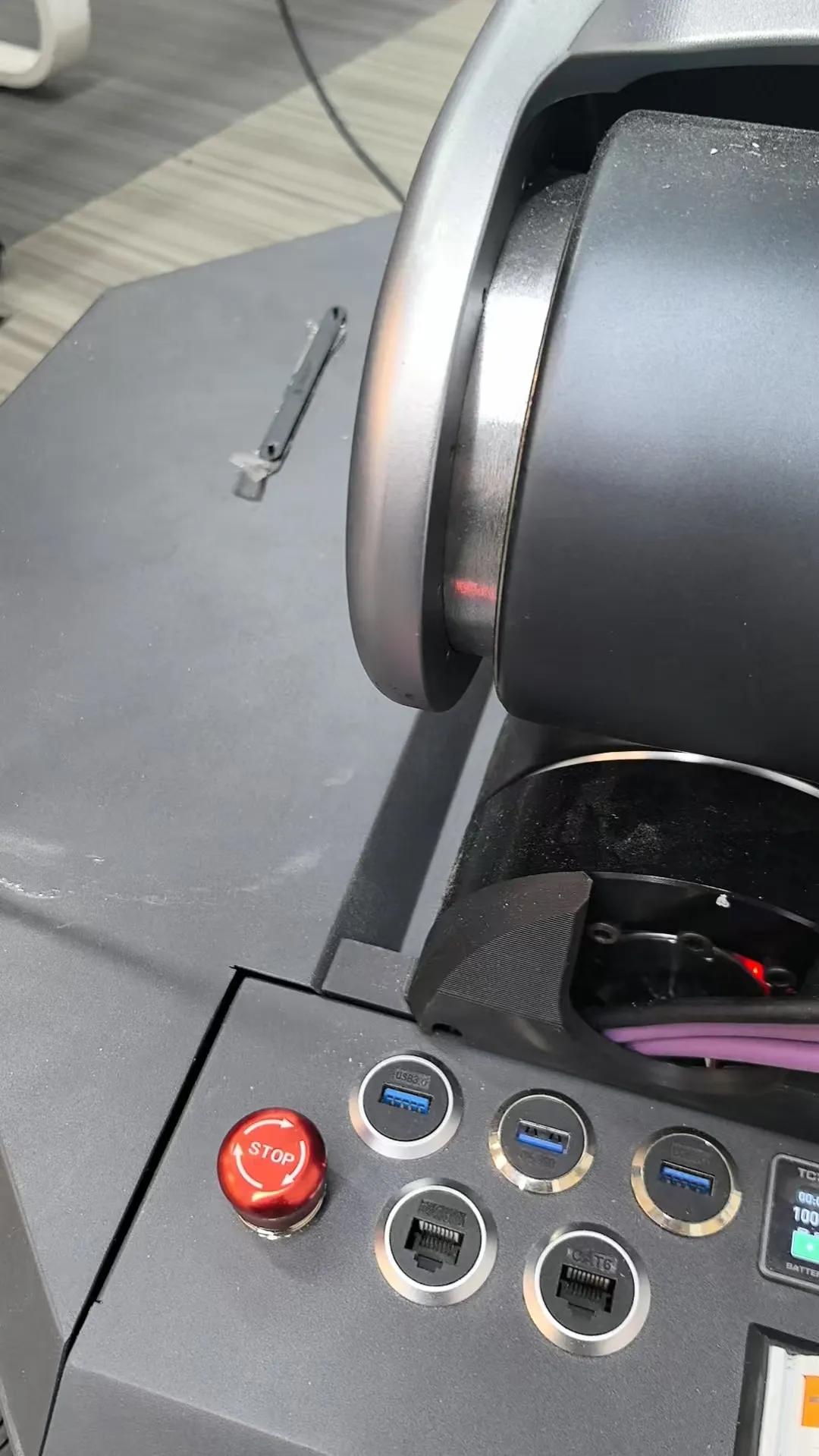
设备总电源开关位于移动平台后方位置,如图所示,各功能项说明如下:
- ①移动平台急停按钮:旋转复位式红色蘑菇头按钮,拍下后需手动复位。
- ②采集/推理主机开关:短按开/关机,按下后等待60s;红灯代表开机状态。
- ③USB插口:连接VR遥操设备
- ④网线插口:内接运控单元LAN 4口,固定IP172.16.1.20。
- ⑤电池电量显示屏:实时显示当前电量。
- ⑥设备总电源开关:机器人及采集/推理主机总电源开关。
拨开⑥设备总电源开关,②采集/推理主机开关及⑤电池电量显示屏同步亮起,等待3~5min,待系统完全启动。
- 采集/推理主机不使用时可关闭以维持电量,按住②停留1s后松开,等待60s后即关机;
- 每次关闭总电源前尽量先关闭主机。
连接
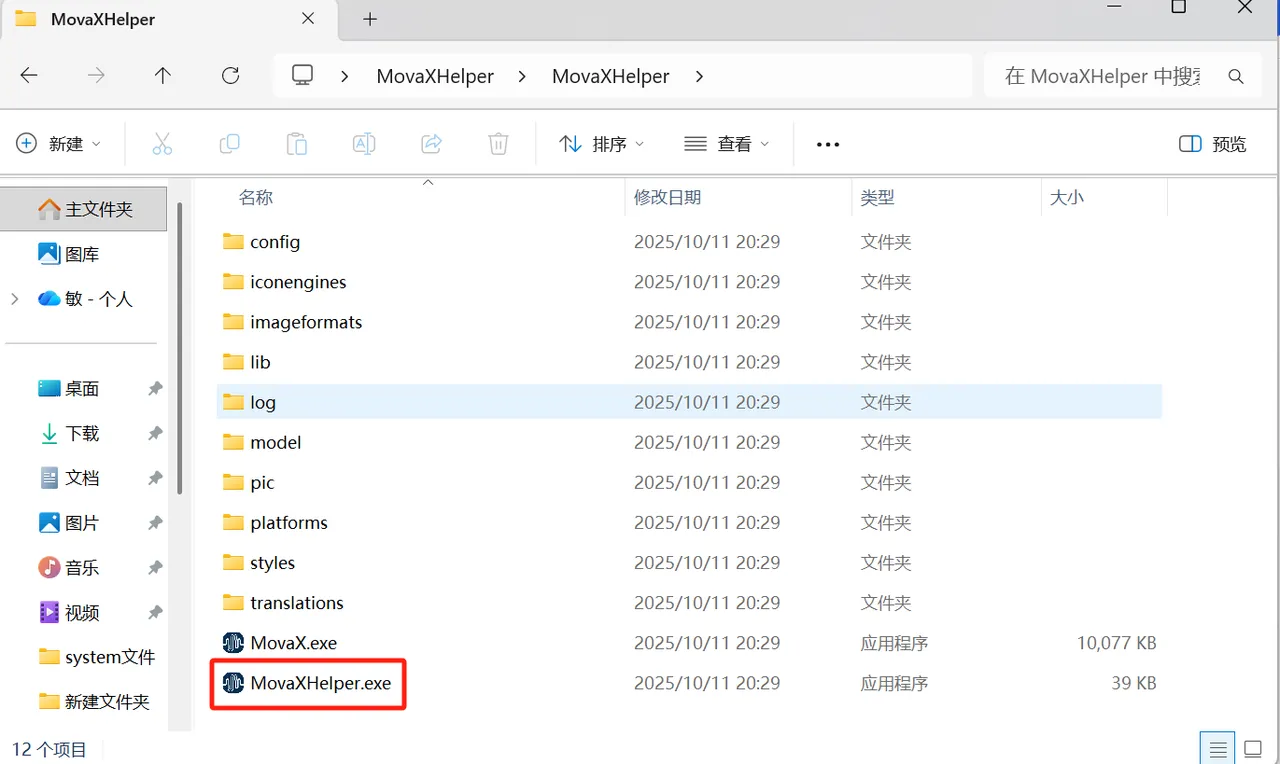 以Windows系统PC端为例,下载MovaXHelper软件压缩包并解压缩,进入文件夹双击MovaXHelper.exe图标,即可打开HMI。 软件包请存放在非中文路径下,否则无法正常打开。
以Windows系统PC端为例,下载MovaXHelper软件压缩包并解压缩,进入文件夹双击MovaXHelper.exe图标,即可打开HMI。 软件包请存放在非中文路径下,否则无法正常打开。 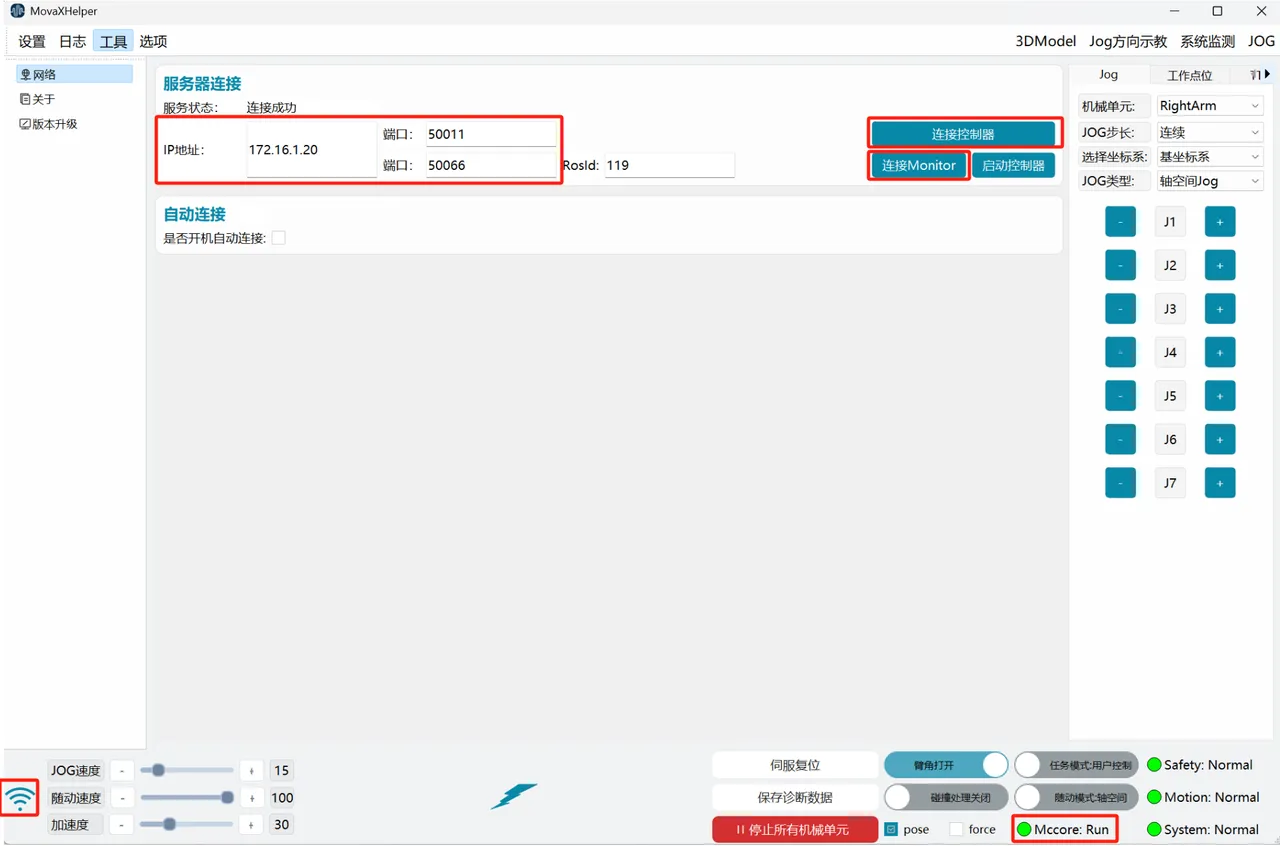 待系统启动后,上位机(IP需与④同网段)可通过网线与设备建立连接。 先点击“连接Monitor”,此时界面提示连接成功,且右下角“Mccore”状态灯为绿色,状态显示“Run”,则表示连接成功。 再点击“连接控制器”,此时界面提示连接成功,且界面左下角信号状态为满格则表示连接成功。
待系统启动后,上位机(IP需与④同网段)可通过网线与设备建立连接。 先点击“连接Monitor”,此时界面提示连接成功,且右下角“Mccore”状态灯为绿色,状态显示“Run”,则表示连接成功。 再点击“连接控制器”,此时界面提示连接成功,且界面左下角信号状态为满格则表示连接成功。
平板连接
 平板通过 WIFI 设置连接机器人自带 WIFI 热点 “MOZ1-0900x”,默认密码 “spirit-ai”。
平板通过 WIFI 设置连接机器人自带 WIFI 热点 “MOZ1-0900x”,默认密码 “spirit-ai”。 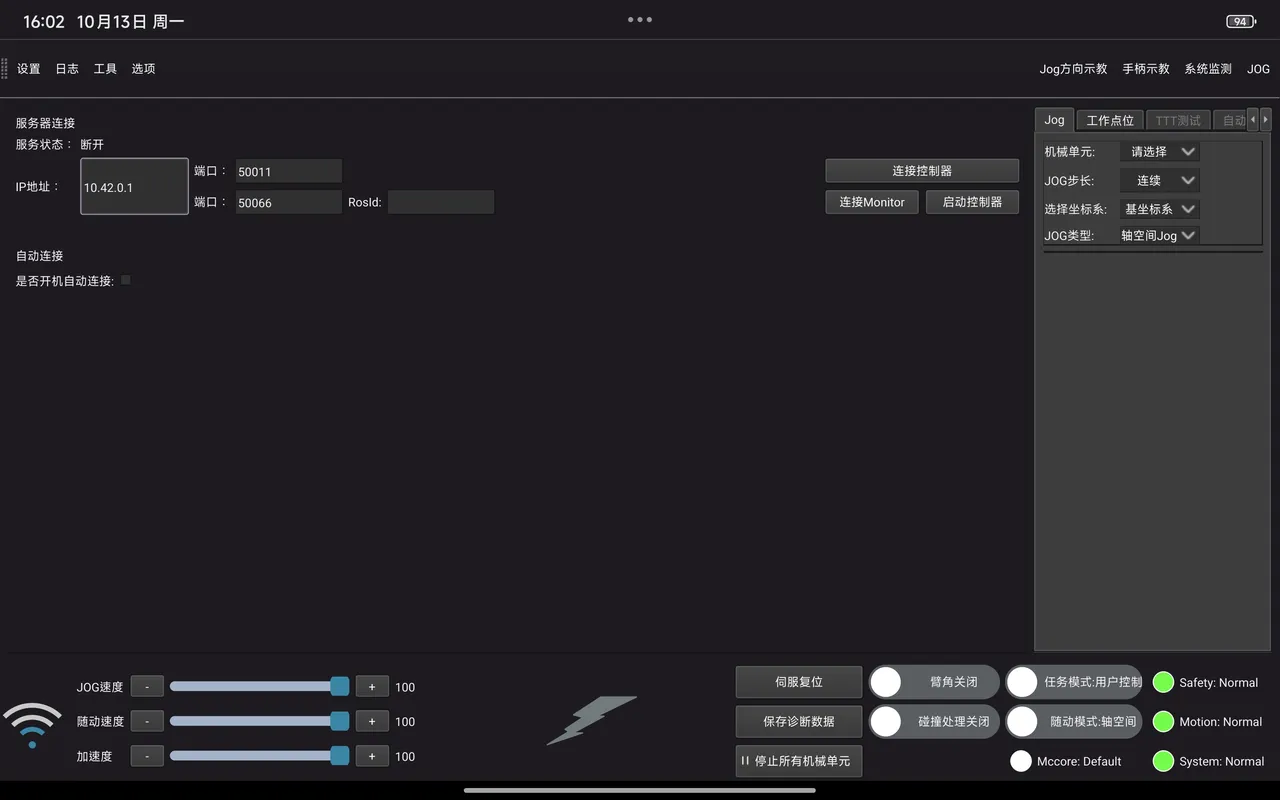 启动桌面应用程序 “SpiritAI MovaX”,等待界面启动。IP地址及端口如图所示,软件使用方式与PC端相同。
启动桌面应用程序 “SpiritAI MovaX”,等待界面启动。IP地址及端口如图所示,软件使用方式与PC端相同。
用户权限登录
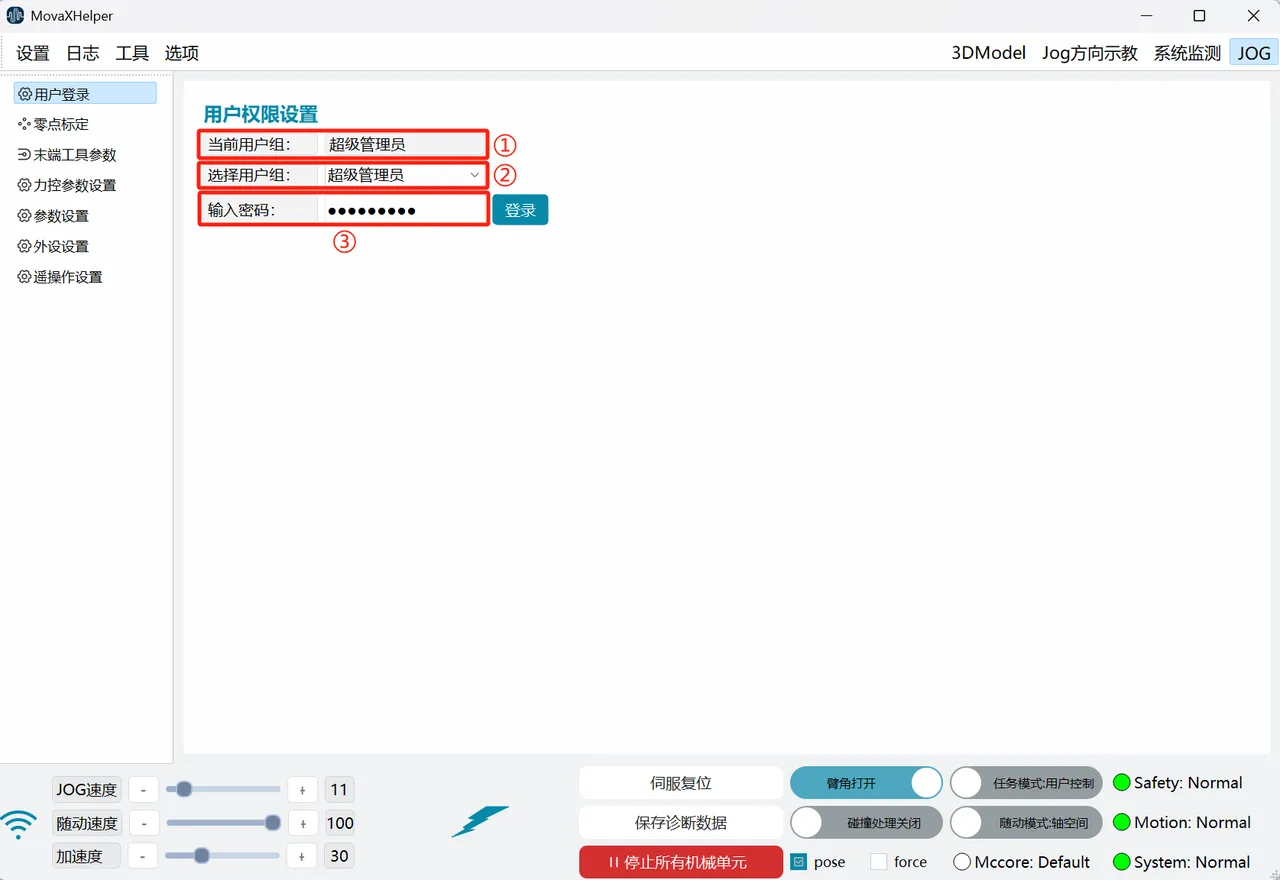 MovaX系统内置了四个级别的用户,根据操作权限从低到高分别是普通用户、数采员,开发员,超级管理员。连接控制器后,默认登录普通用户;切换到其他权限用户需要输入密码。
MovaX系统内置了四个级别的用户,根据操作权限从低到高分别是普通用户、数采员,开发员,超级管理员。连接控制器后,默认登录普通用户;切换到其他权限用户需要输入密码。
- ① 当前用户组:当前登录用户组。
- ② 选择用户组:选择要登录的用于组。
- ③ 输入密码:各用户组开放权限及默认密码如下:
| 用户 | 密码 | 权限 |
|---|---|---|
| 普通用户 | 123456 | 设置:用户登录、零点标定、参数设置、外设设置、遥操作设置 日志:HMI日志 工具:设置工作点位、伺服状态 选项:网络、关于、版本升级 JOG:Jog、工作点位 机械单元:上下电 |
| 数采员 | 123456 | 设置:用户登录、零点标定、参数设置、外设设置、遥操作设置 日志:HMI日志 工具:设置工作点位、伺服状态 选项:网络、关于、版本升级 JOG:Jog、工作点位 机械单元:上下电、关节阻抗 |
| 开发员 | spirit | 设置:用户登录、零点标定、末端工具参数、力控参数设置、参数设置、外设设置、遥操作设置 日志:HMI日志 工具:TTTTTest点位、力传感器标定、设置工作点位、伺服状态、伺服参数设置、诊断数据设置、参数版本管理 选项:网络、关于、版本升级 JOG:Jog、工作点位 、TTTTest、自动标定 机械单元:上下电、关节阻抗、碰撞检测、拖动模式 |
| 超级管理员 | spirit-ai | 设置:用户登录、零点标定、末端工具参数、力控参数设置、参数设置、外设设置、遥操作设置 日志:HMI日志 工具:TTTTTest点位、力传感器标定、设置工作点位、伺服状态、伺服参数设置、诊断数据设置、参数版本管理 选项:网络、关于、版本升级 JOG:Jog、工作点位、TTTTest、自动标定 机械单元:上下电、关节阻抗、碰撞检测、拖动模式 |
开机后检查
状态检查
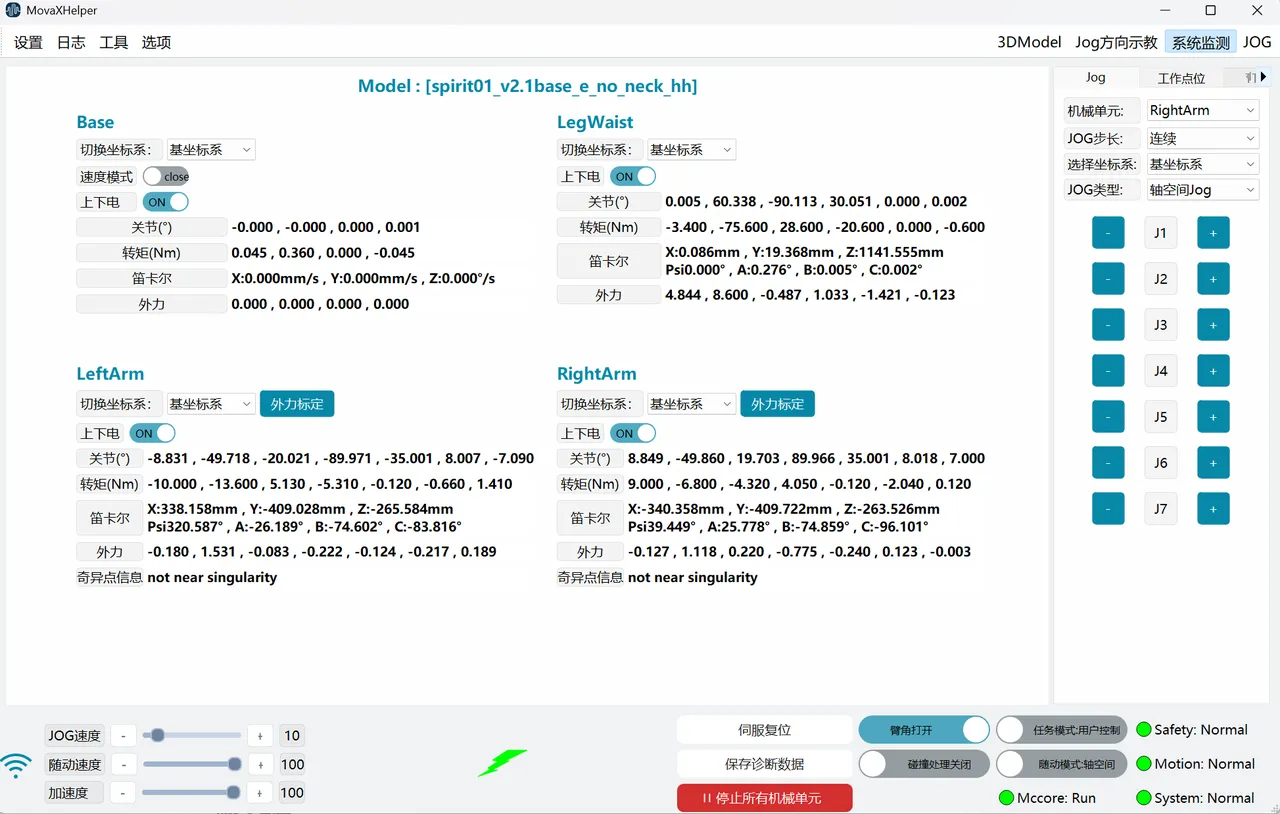
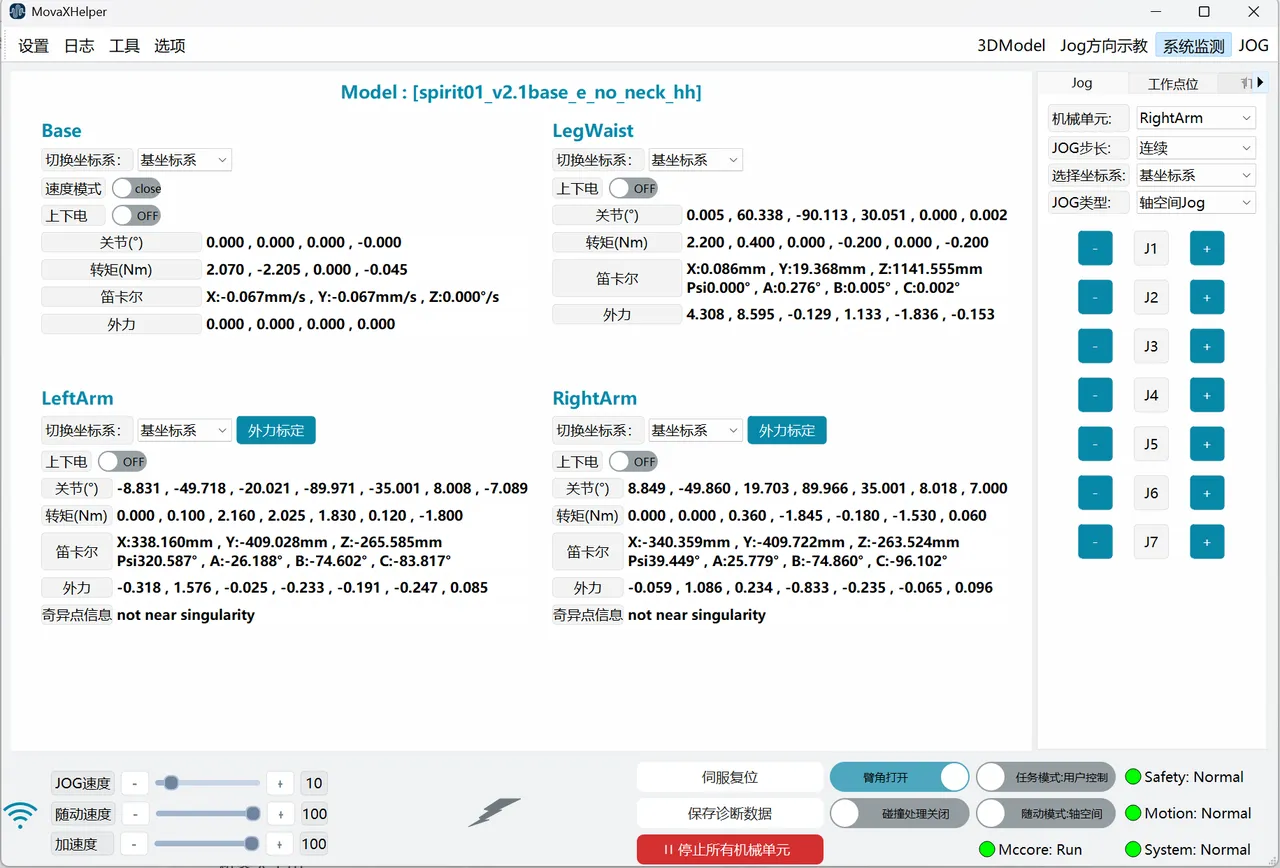 成功连接控制器后,通过HMI顶部状态栏“系统监测”按钮进入功能页面页面,此时:
成功连接控制器后,通过HMI顶部状态栏“系统监测”按钮进入功能页面页面,此时:
- 系统监测页面上数值应是不断变化的;
- 界面右下角“Safety”“Motion”“System”状态灯为绿色,状态显示“normal”; 符合现象上述两点,则表示机器人启动无异常,否则请联系技术支持。
急停检查
| 移动平台急停 | 背部急停 | 手持无线急停 |
|---|---|---|
 |  |  |
机器人共有三个急停开关,其中两个为旋转复位式红色蘑菇头按钮,分别位于移动平台后方及本体背部;另一个为自复位的手持无线急停。两者区别为,红色蘑菇头按钮按下后需手动旋起复位,而手持急停无需此操作。
上电状态下,拍下后背急停,查看反馈:
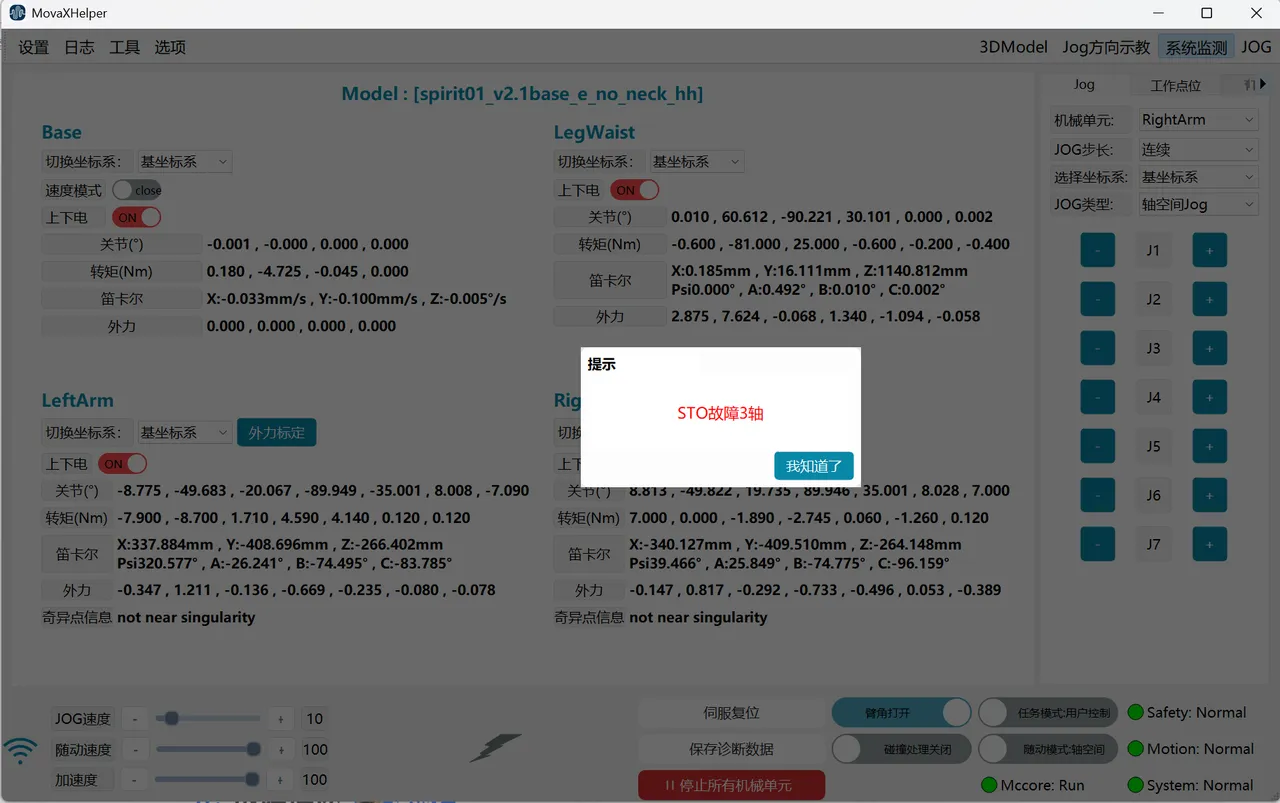
- 若此前为上电状态,则所有机械单元同时下电,并伴随抱闸闭合的声音;
- HMI界面弹窗报警“STO故障X轴”,同时“系统监测”界面,所有上电机械单元的上电开关变红,所有数值均不再变化;
- 清除报警弹窗后仍无法上电;
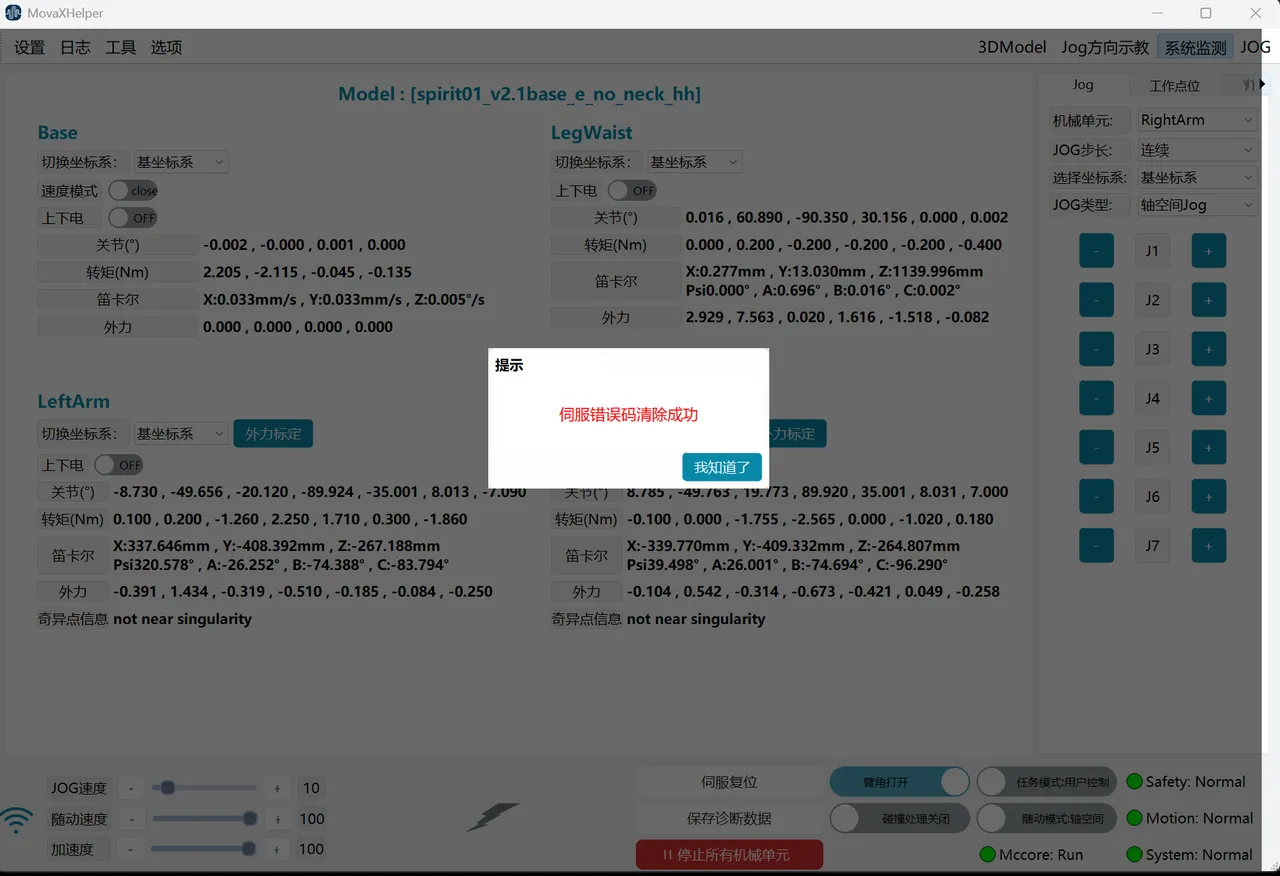
- 手动旋起背部急停按钮,点击HMI界面右下“伺服复位”,界面弹窗提示“伺服错误码清除”,界面恢复正常,可正常上下电;部分情况下无法仅通过“伺服复位”恢复,则从“网络”页面点击“启动控制器”进行重启,重启后再进行“伺服复位”。
若现象符合上述四点,则表示机器人急停功能无异常,否则请联系技术支持。 重复上述步骤,分别验证移动平台急停、手持无线急停(手持急停执行第四步时,不需要手动复位)。
上下电检查
“系统监测”页面,每个机械单元都有一个对应的“上下电”开关。 拿好手持急停,与机器人保持一定距离,依次打开每个机械单元的“上下电”开关再依次关闭,查看反馈:
- 开启开关时,状态显示为“ON”,同时能听到对应机械单元松开抱闸的声音;
- 机械单元上电后仍保持静止状态,无飞车现象;
- 关闭开关时,状态显示为“OFF”,同时能听到对应机械单元闭合抱闸的声音;
- 无机械单元上电时,底部闪电符号显示为灰色;部分上电时,显示为黄色;全部上电时,显示为绿色;
若现象符合上述四点,则表示机器人上下电功能无异常,否则请联系技术支持。
零点校验
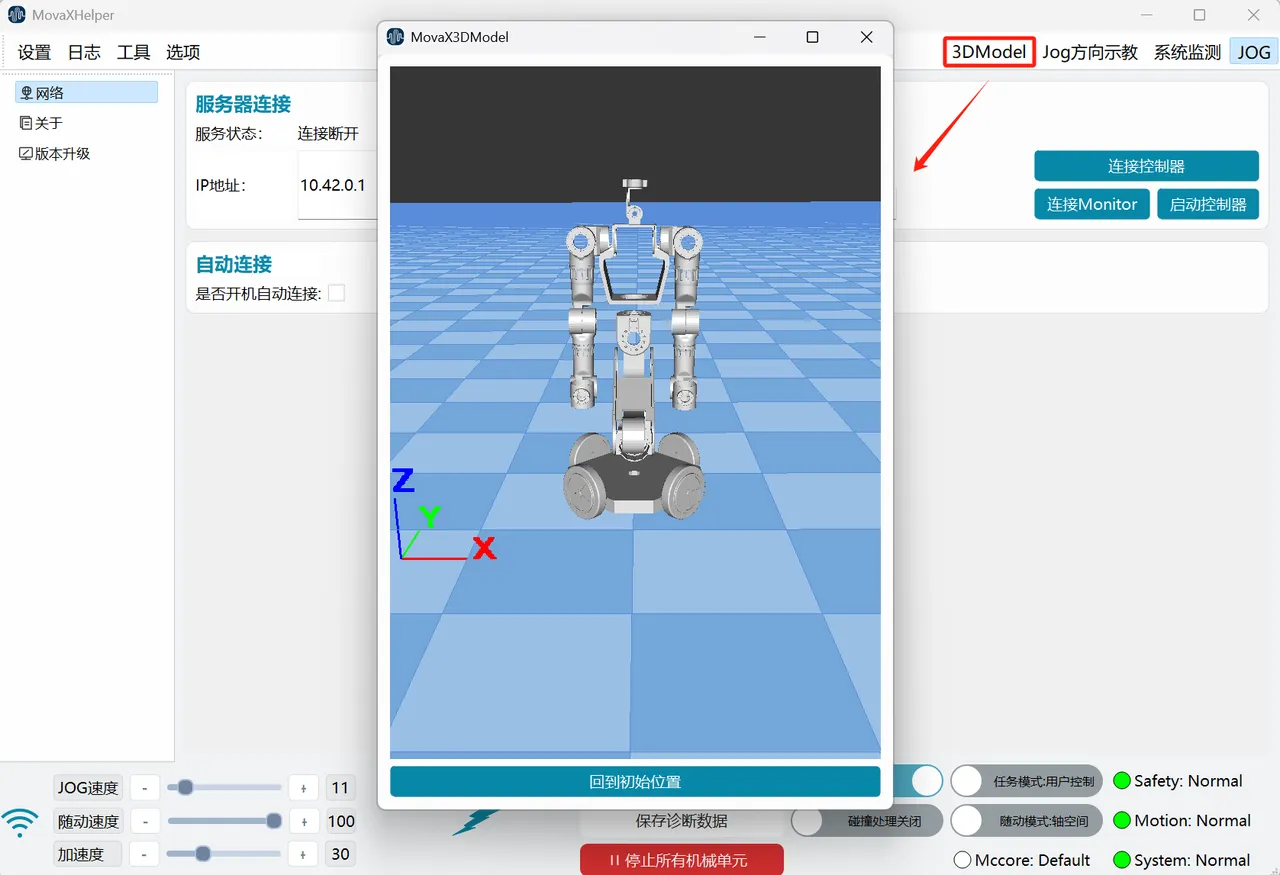
通过顶部状态栏“3DModel”打开浮动面板,查看3D模型显示位姿是否与机器人实际位姿一致,若两者存在较大差异,或存在零点丢失情况,需重新标定零点,请联系技术支持。 若3D模型位姿与机器人实际位姿基本一致,则按下述步骤进一步确认。
 |  |
|---|
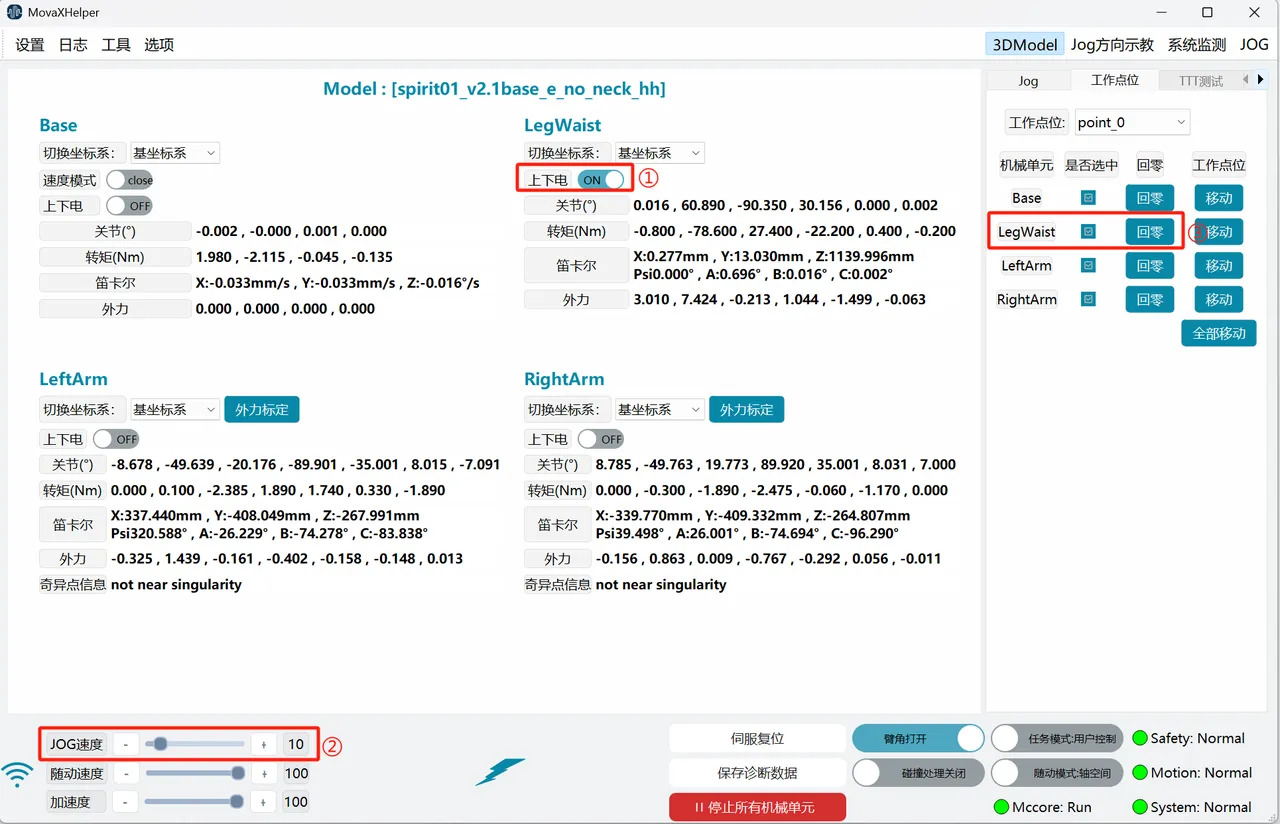
拿好手持急停,与机器人保持一定距离:
- 通过顶部状态栏“系统监测页面”将单机械单元上电;
- 通过底部状态栏将“JOG速度”调整到10以下;
- 进入右侧操控面板“工作点位”页面,点击①中机械单元“回零”;
- 过程中时刻注意机器人位姿,避免发生碰撞,直至运行结束(此时Motion显示Normal);
- 将①中机械单元下电,查看机械单元各轴零点标定槽是否对齐,若存在偏差则需重新标定。