快速开箱指南
包装检查
- 在进行机器人开箱之前,请将机器人包装箱移动至空旷平整地面(正面至少有1.5-2m空间供机器人运行出箱);
- 开箱人员绕包装箱逆时针绕行一周,对机器人包装箱体进行检查。包括但不限于外观、箱体、锁扣、铰链、脚轮等是否完好,确保机器人在运输过程中没有事故或者损坏。如发现机器人包装箱存在破损,请及时与我司联系;
- 确认包装箱上的封箱条是否在运输过程中被人为开封。如发现机器人存在未知情下被启封的情况,请及时与我司联系;
- 此外,还需确认包裹上的标签信息与订单是否相符。如相关信息不符,请及时与我司取得联系;
开箱步骤
在进行如下步骤之前,请确保“包装检查”中的检查项均已完成且无异常;
第一步
移动机器人航空箱至开阔平坦的地面,脚轮处锁止状态,确保箱体不会自行滑动。
 1-1
1-1
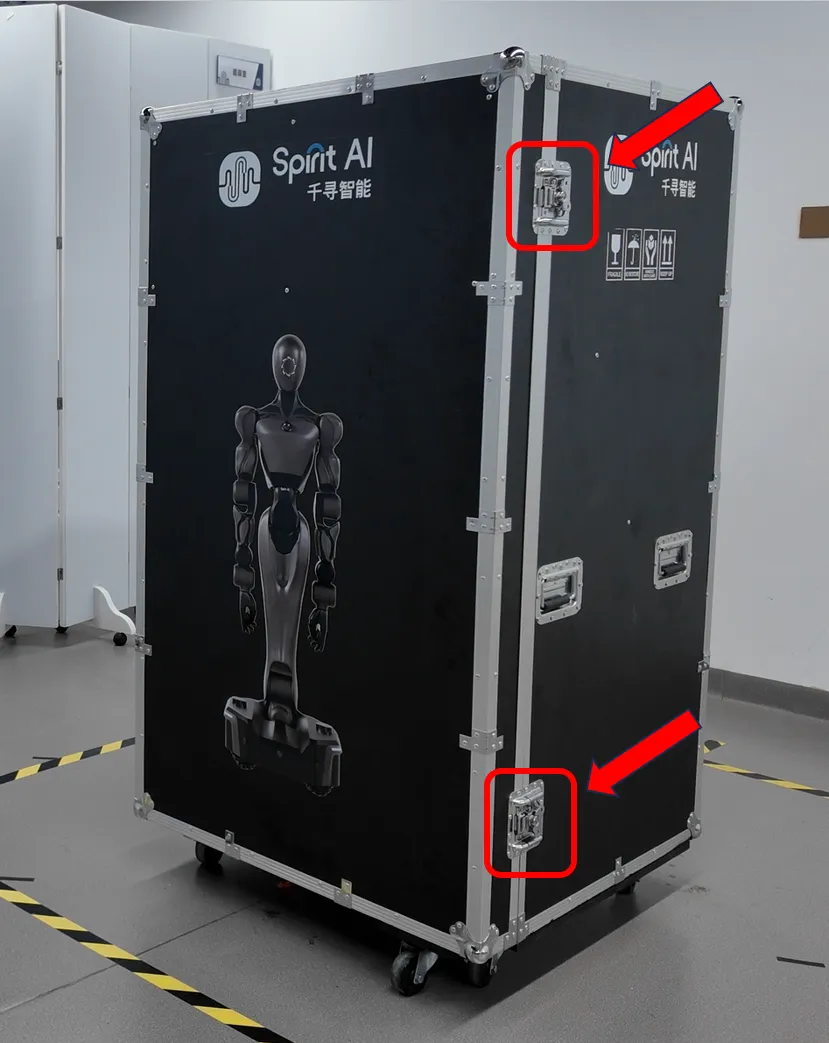
第二步
依次松开航空箱门右侧的上下两个旋转卡扣,使其与卡扣槽分离。
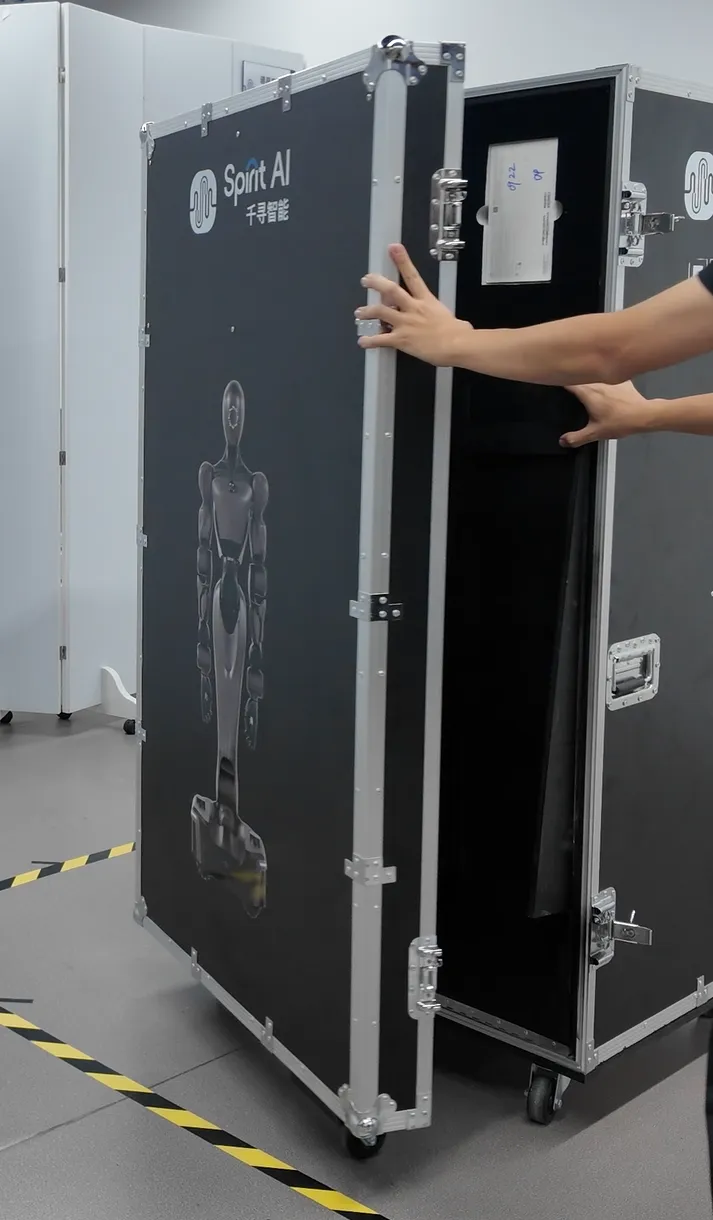
第三步
缓慢开启箱门,同时留意箱内的情况,直至箱门完全打开;确保斜坡卡扣全程处于锁闭状态,否则不能进入下一步骤。
第四步
在航空箱正面的下方取出捆绑带收紧器/拉紧器,扳动棘轮使其释放捆绑带,将捆绑带尽可能的释放,相关操作如下所示;
| 序号 | 示意图 | 操作说明 |
|---|---|---|
| 一 |   | 从航空箱正面底部抽出拉紧器 |
| 二 |  | 绕旋转轴转动掰开拉紧器 |
| 三 | 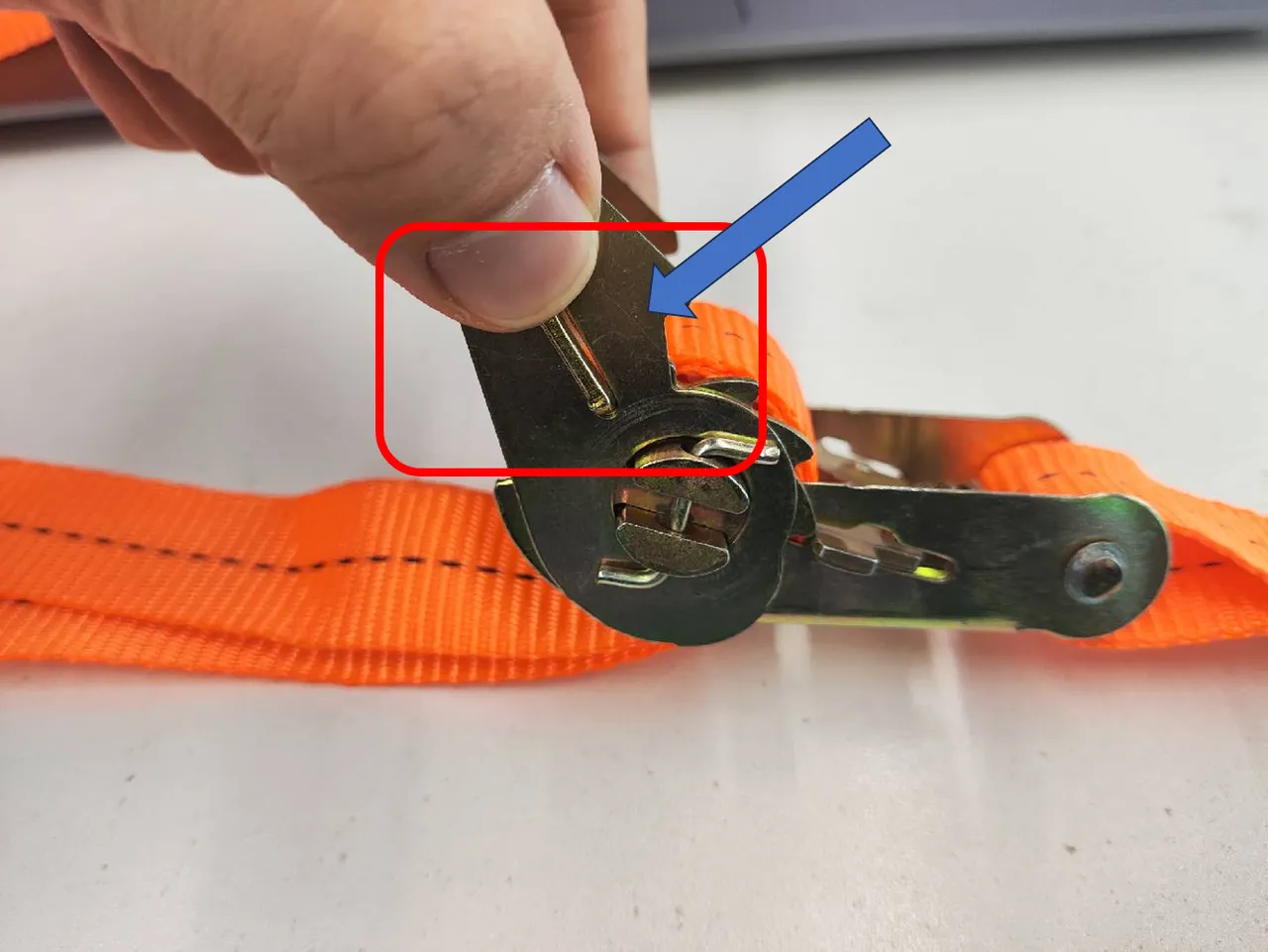 | 使用手持往上放拉动两侧卡片(蓝色箭头指向处),然后继续旋转使其卡入第二槽口,释放状态如下图所示 |
| 四 | 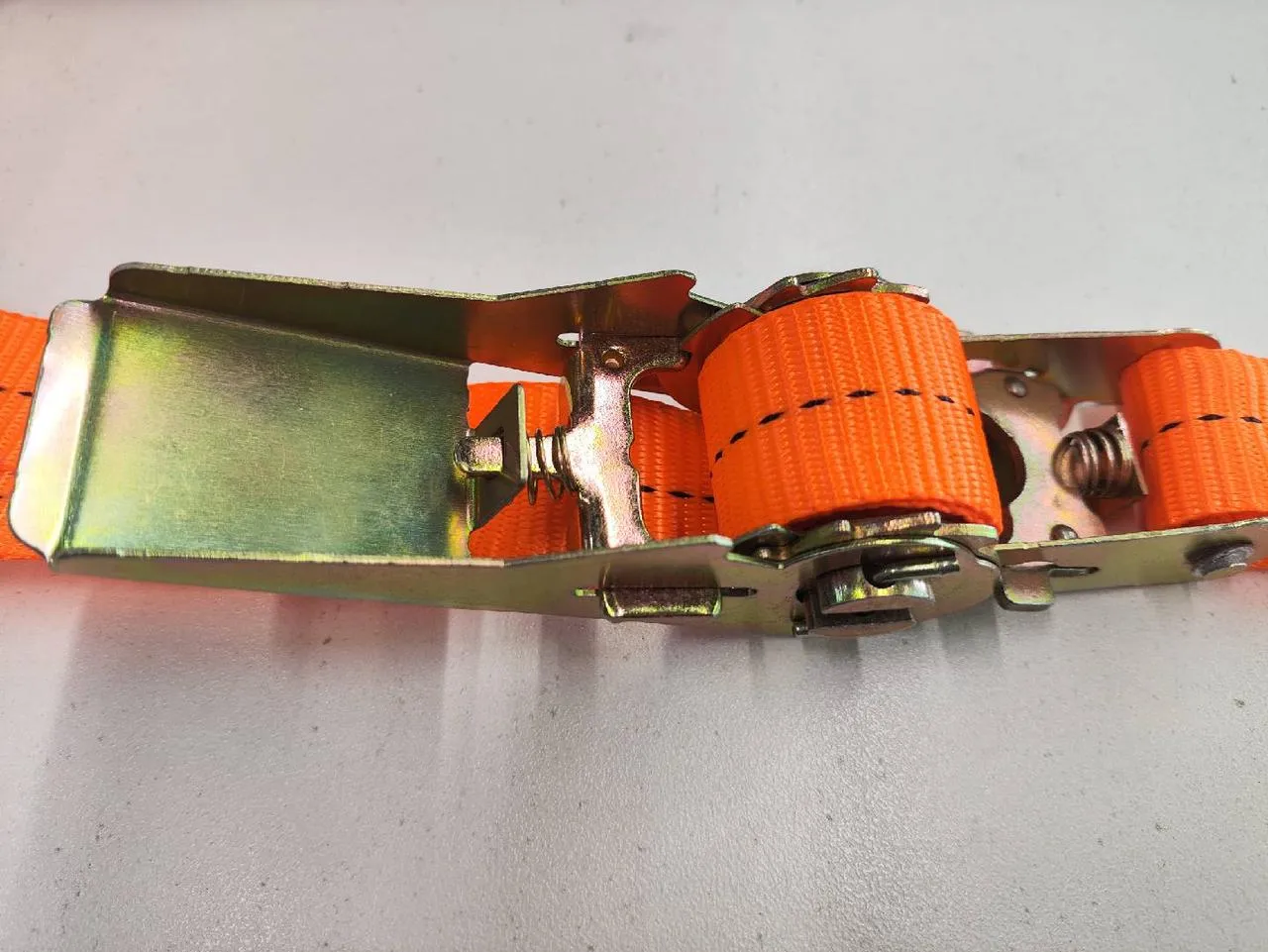  | 此时拉紧器为完全打开状态 |
| 五 | 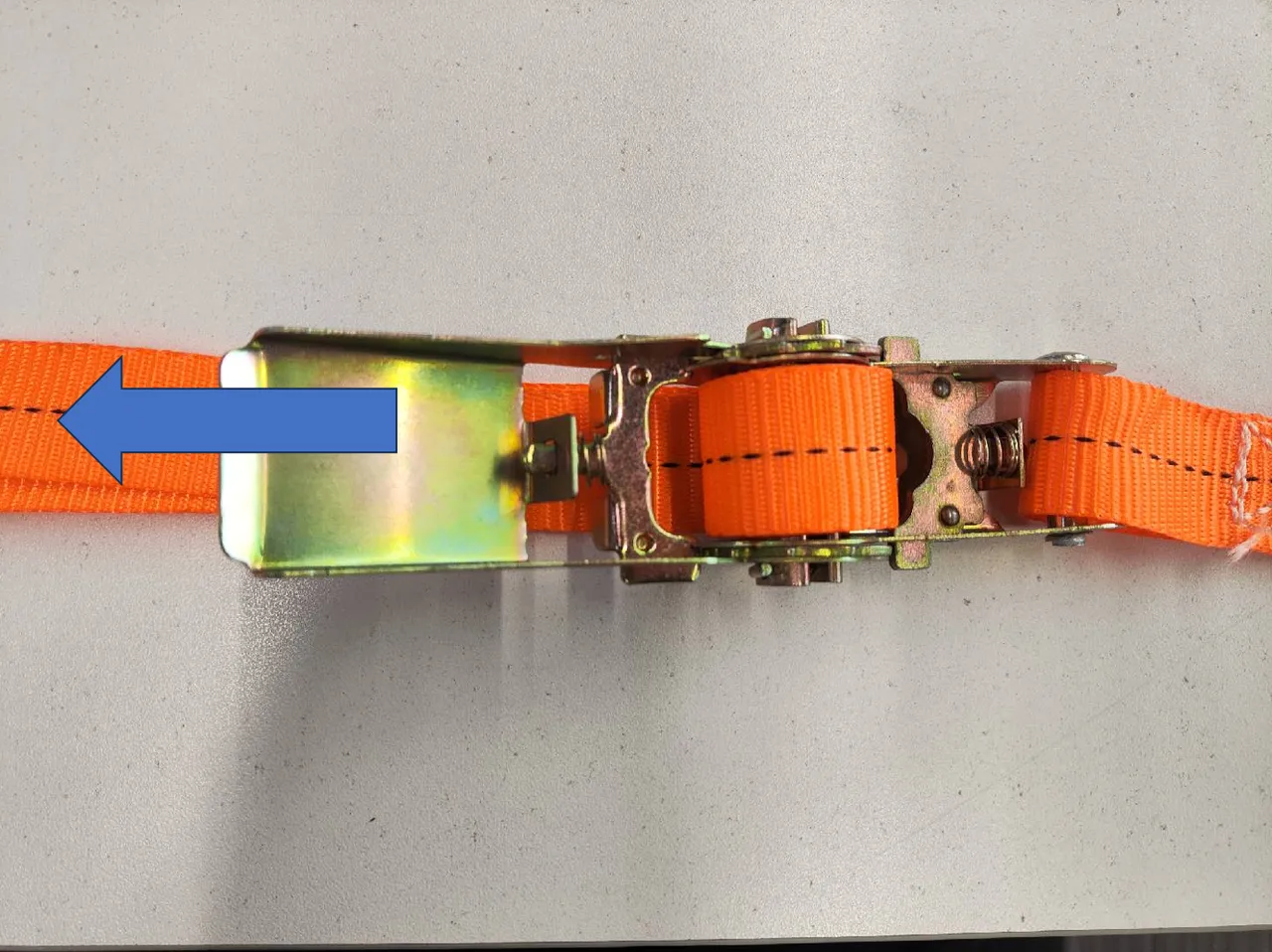  | 向捆绑绳缠绕侧,即拉紧器扳机侧拉动捆绑绳,直至绳索从滚圈上释放(图中蓝色箭头方向) |
| 六 | | 释放到位后,将拉紧器闭合 |
第五步
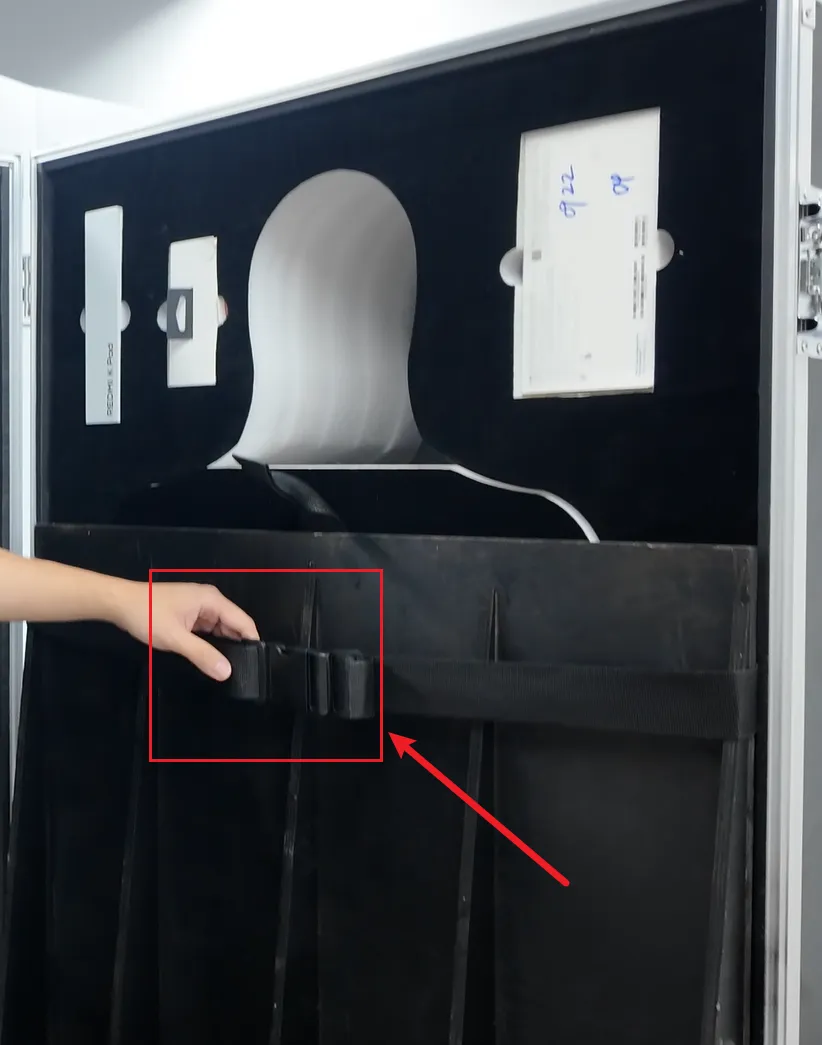
此时可以全面观察到箱内的部分情况,使用双手解开横向的束缚卡扣;
 |  |  |
|---|
第六步
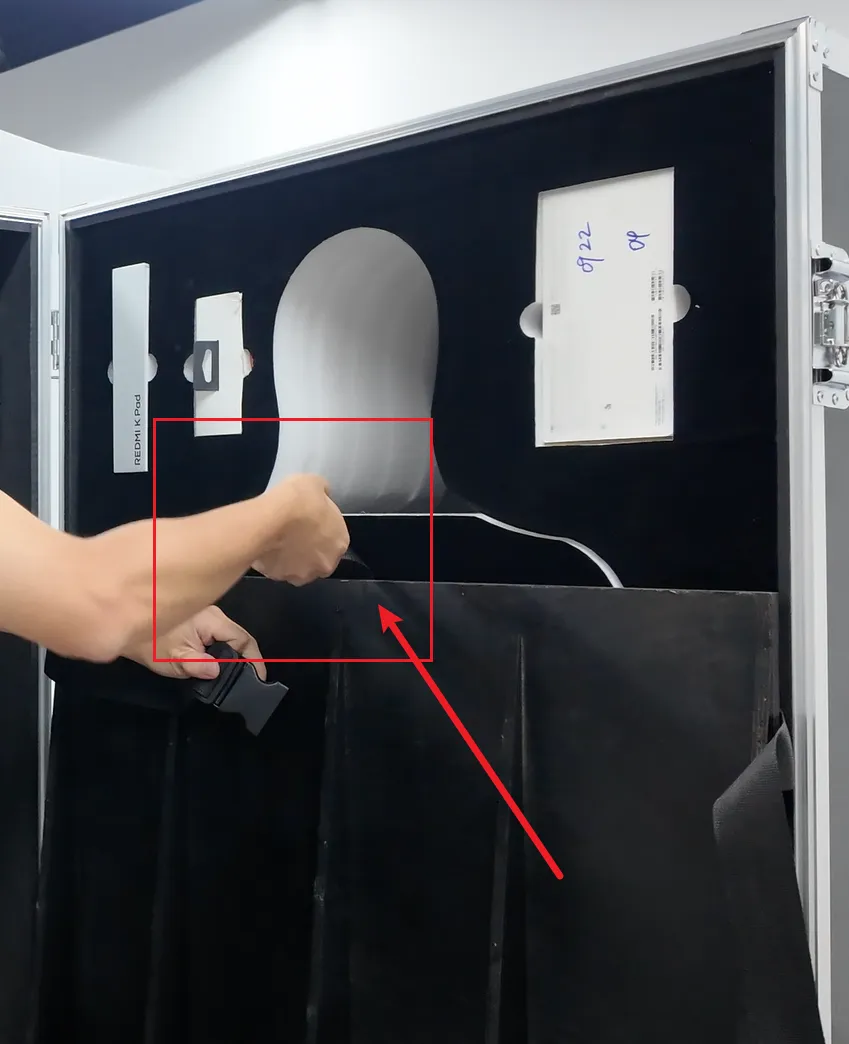
解开固定的卡扣后,然后使用一只手拉住斜坡牵引绳,需要注意斜坡有一定的重量,使用牵引绳引导缓慢放置斜坡,直至斜坡完全与地面进行接触;
 |  |  |
|---|
第七步
此时可看到箱内全景(如图所示);依次从箱子中取出相关配件(VR 眼镜、手柄、平板电脑)等; 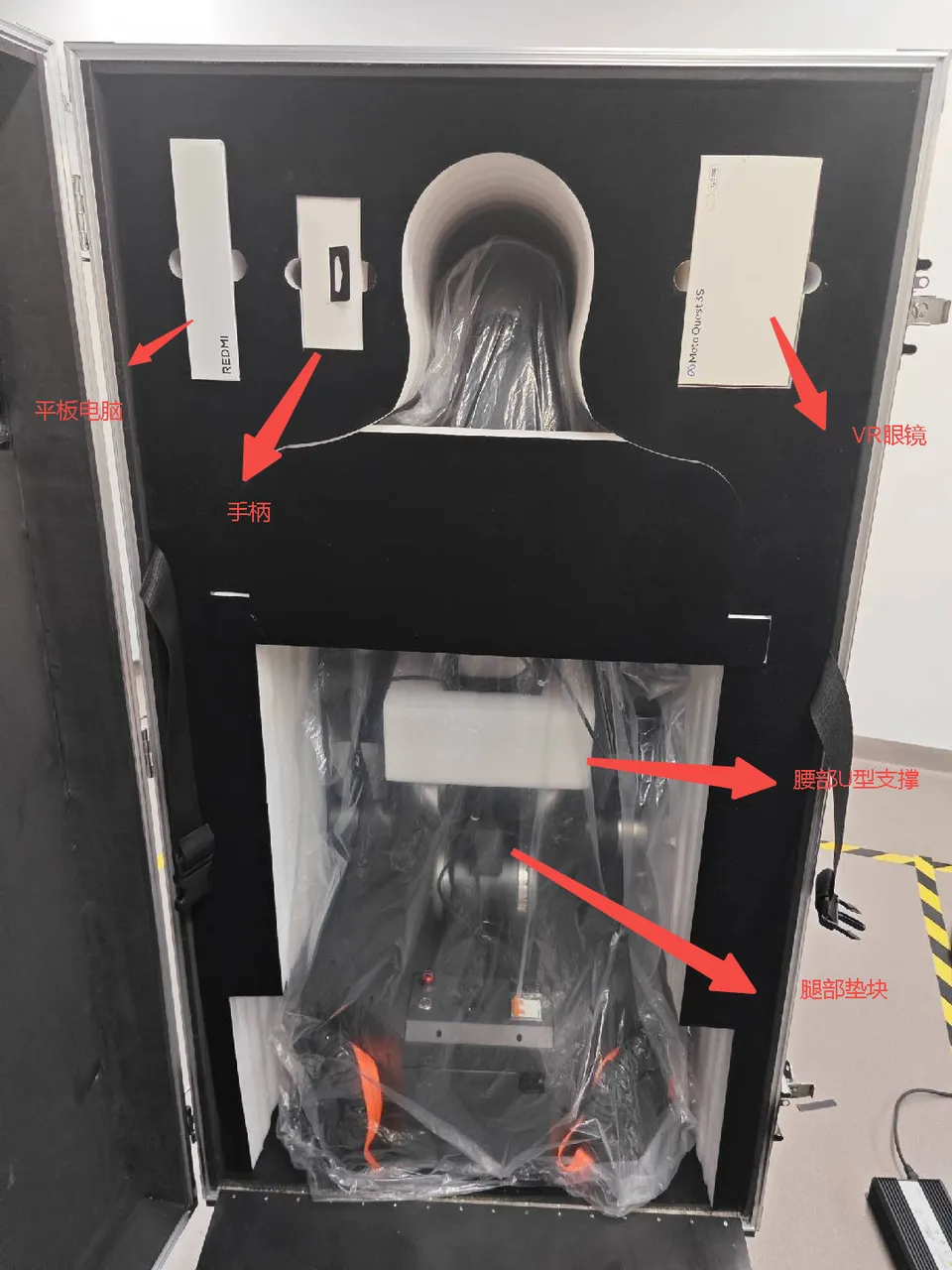
 |  |
|---|---|
 |  |

第八步
从箱子侧门编织网袋中取出机器人相关配件,包括但不限于 VR 连接数据线、机器人充电器、机器人急停开关、纸质文档手册等物品;
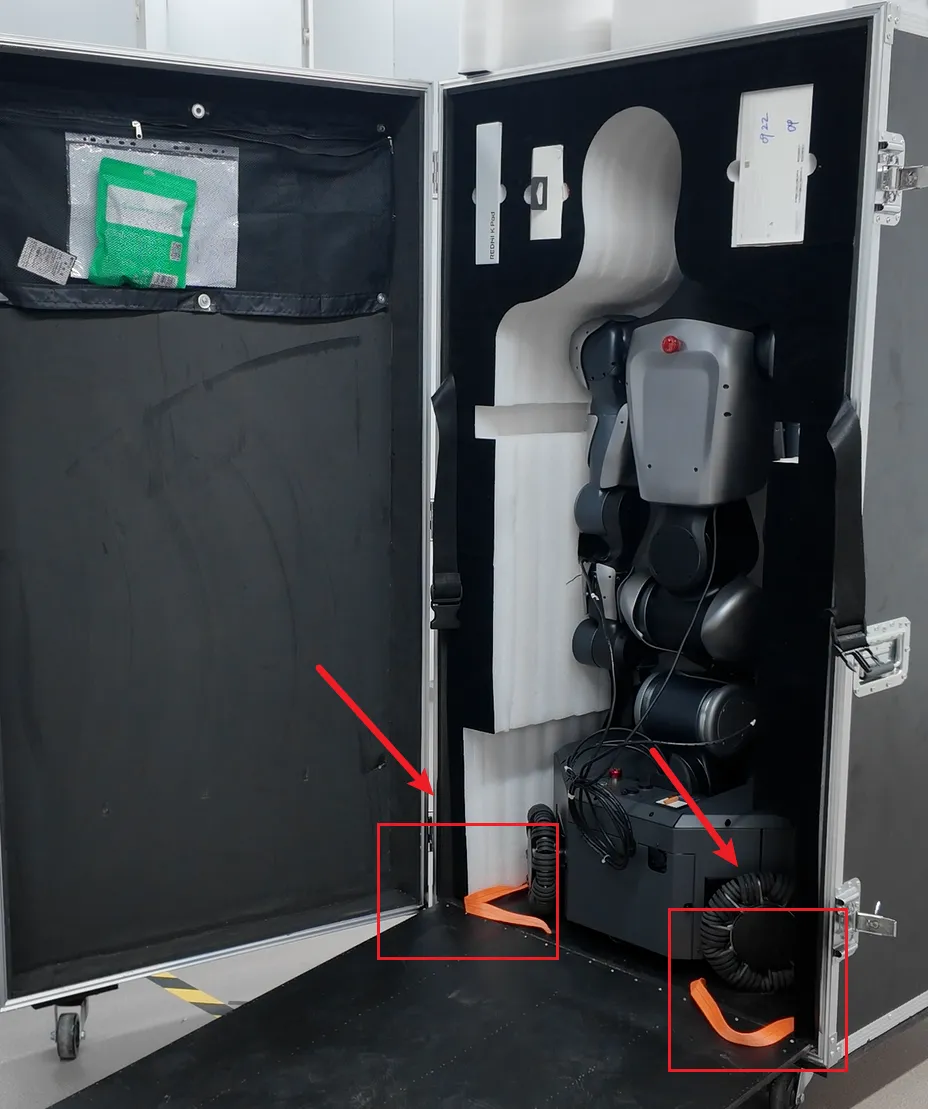
第九步
将前面已经松解的捆绑带,从轮子内侧取出并平埔放置于轮外侧,避免影响驱动轮运行;
 |  |
|---|
第十步
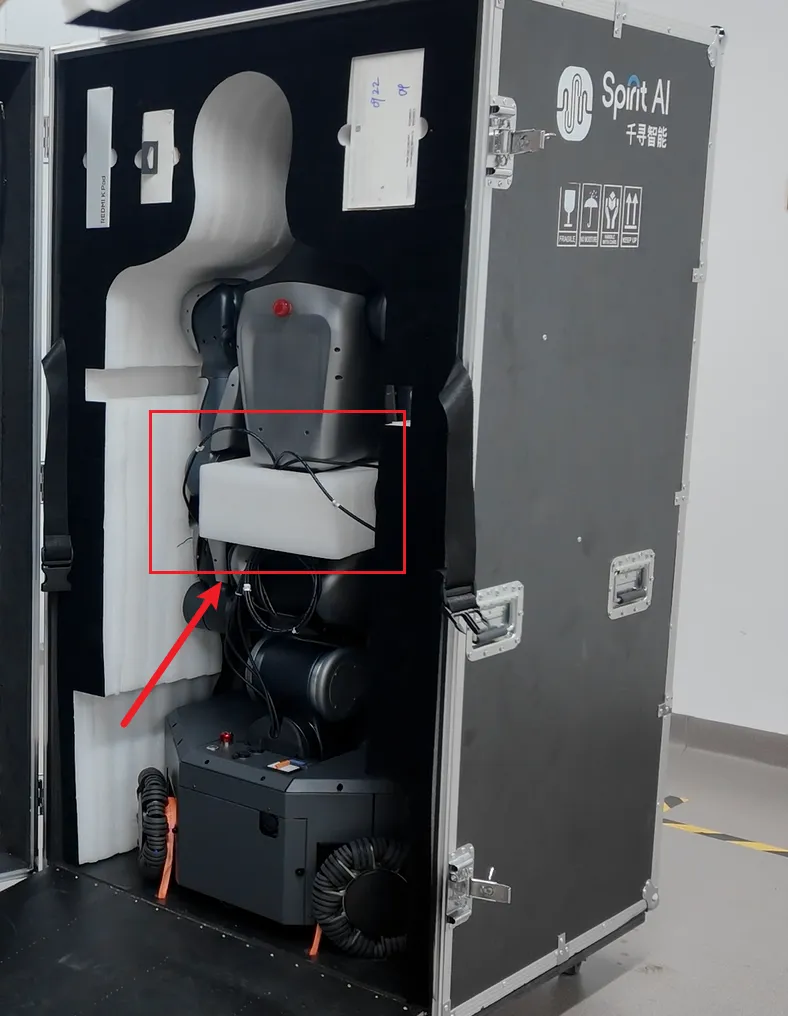
取出机器人后背处的缓冲泡沫块; 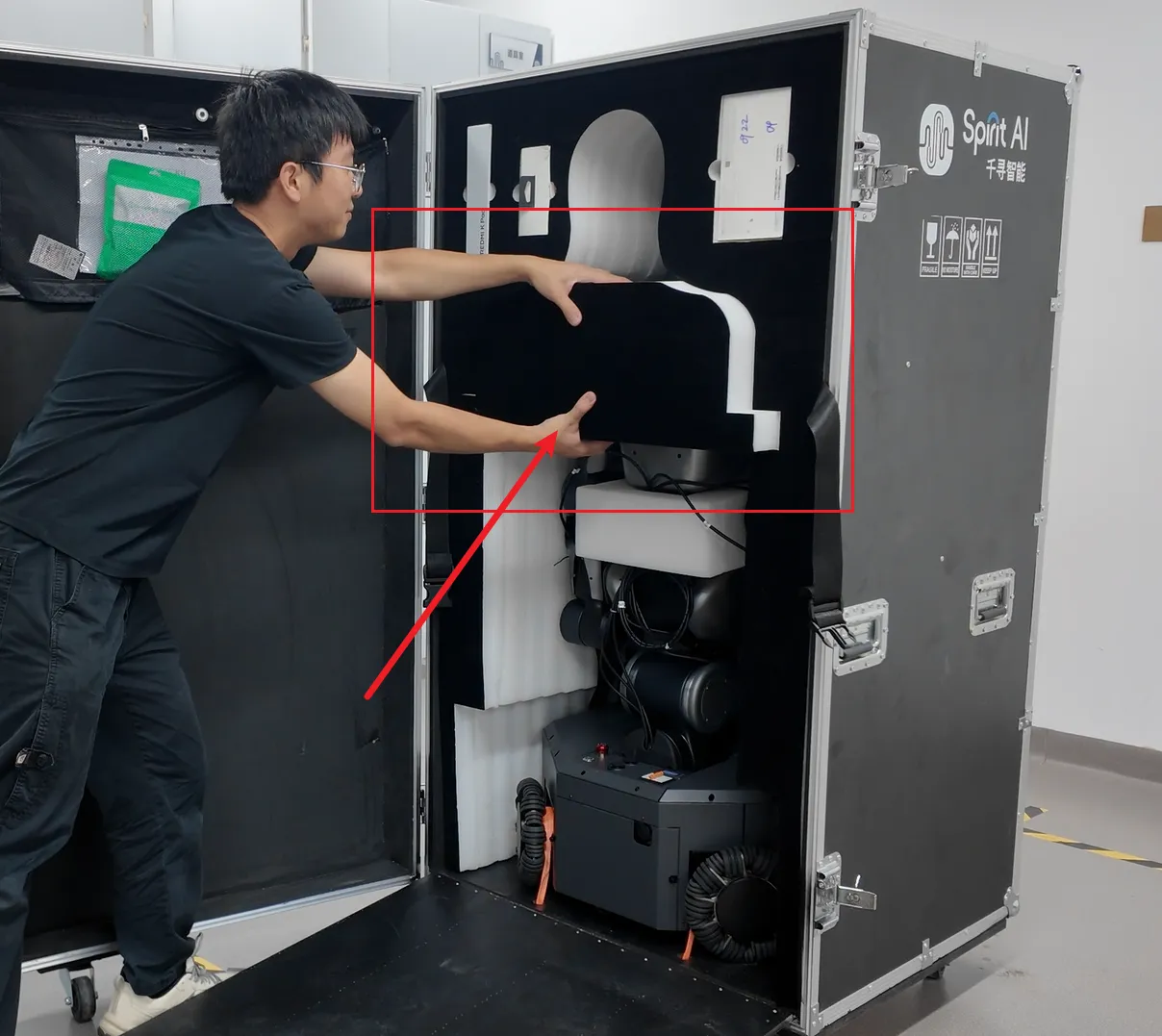
第十一步
检查机器人后背的急停开关与底盘后方的急停开关是否被按下,如被按下,则旋转急停开关进行释放; 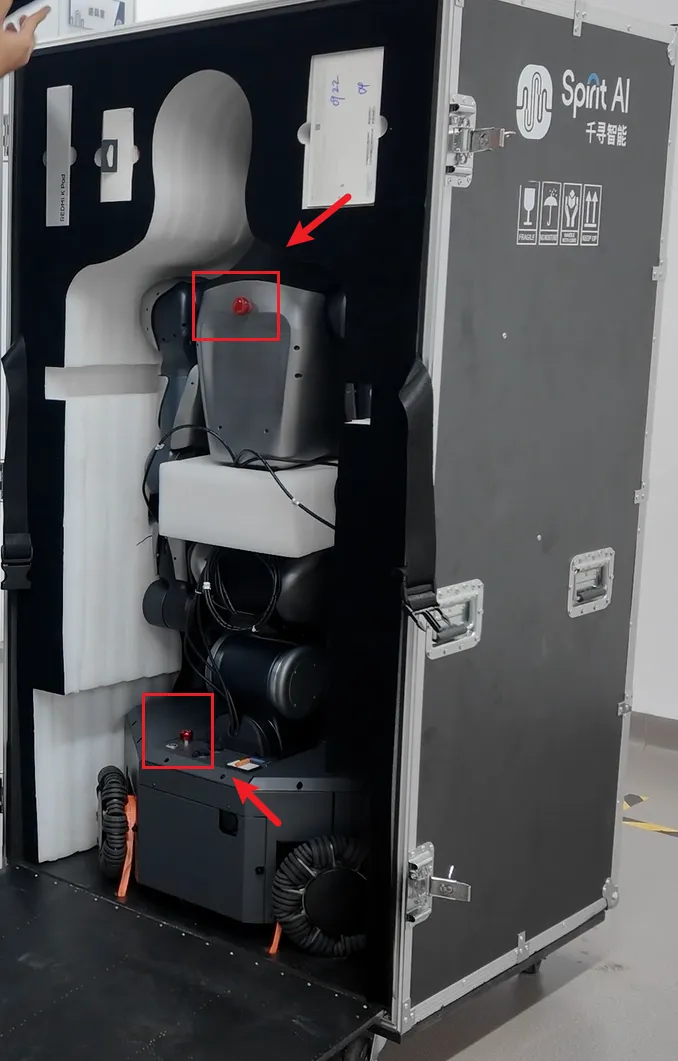
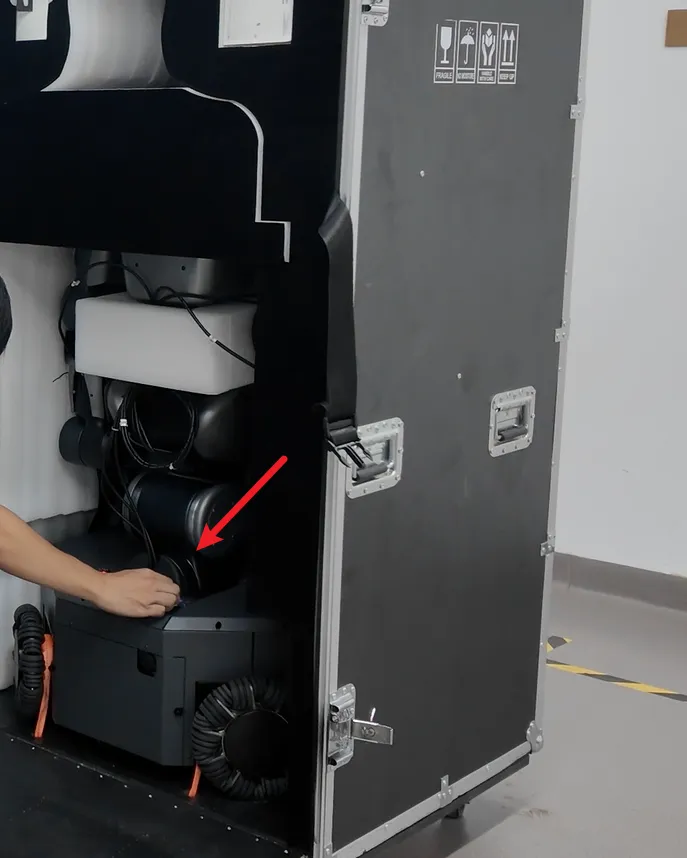
第十二步
确保急停开关为松开状态后,扳动底盘后方的电源总开关为机器人上电,电源开关灯信号灯亮起,等待机器人启动完成;
 |  |
|---|
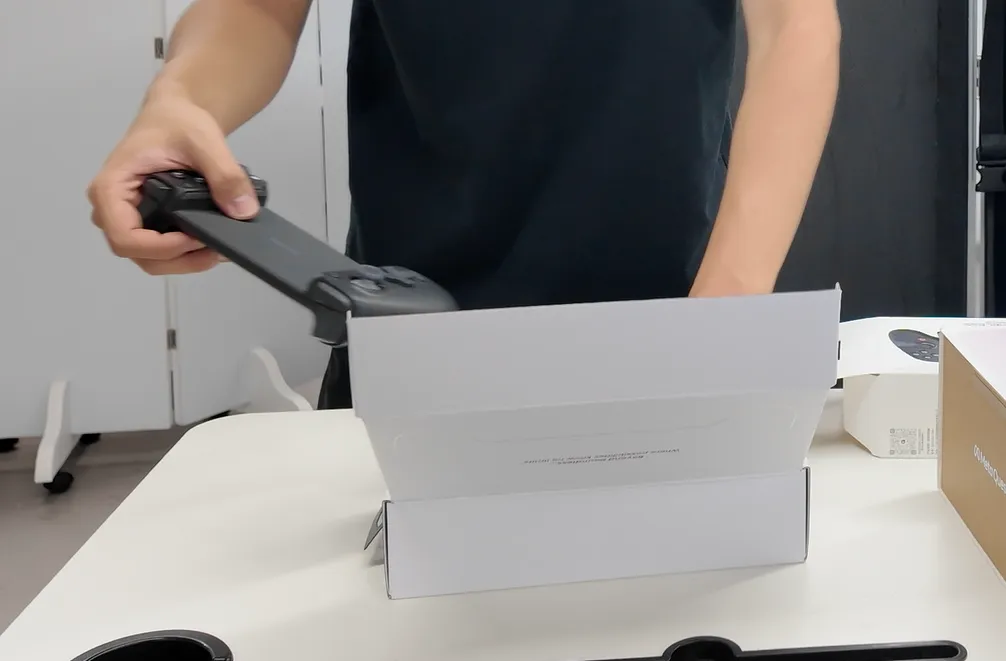
第十三步
打开手柄包装盒,取出操作手柄并放置于桌面,备后续步骤使用;
 |  |
|---|
第十四步
打开平板电脑包装盒,取出并开机; 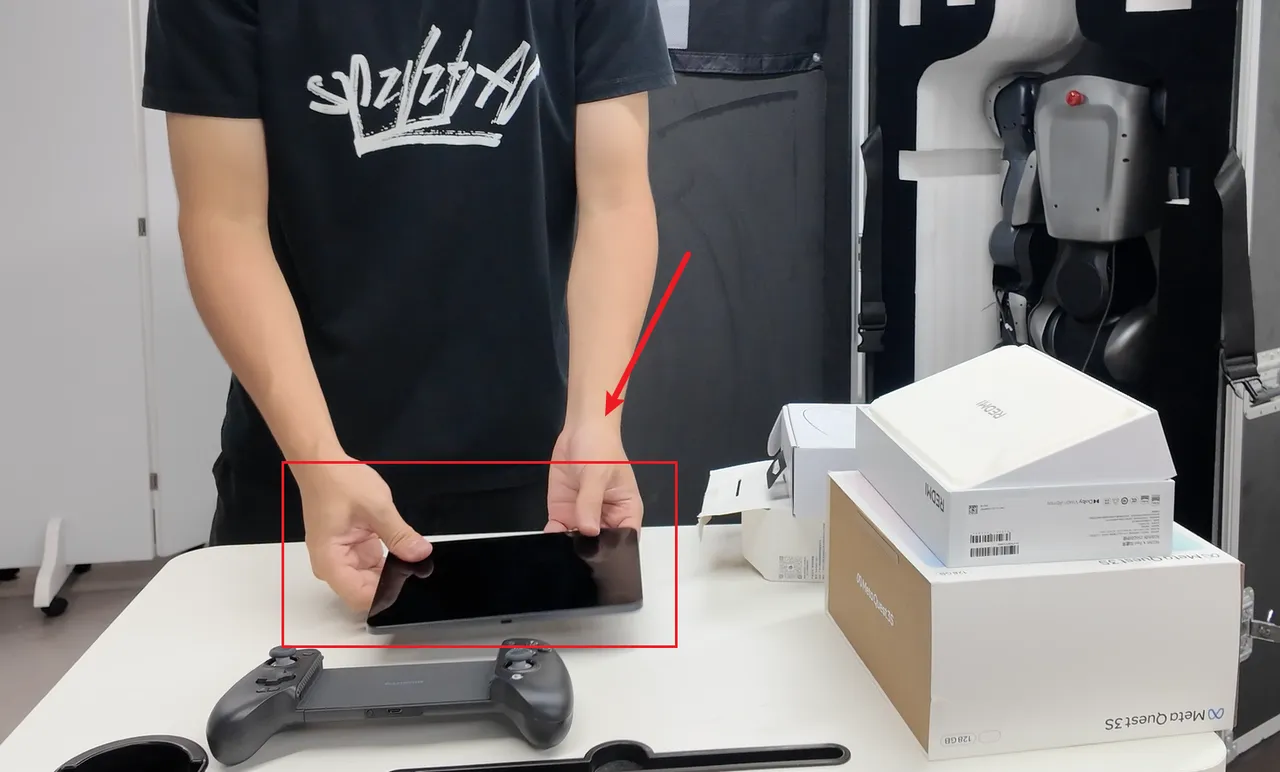
第十五步
将平板电脑放置在操作手柄的终端卡槽内;
 |  |  |
|---|
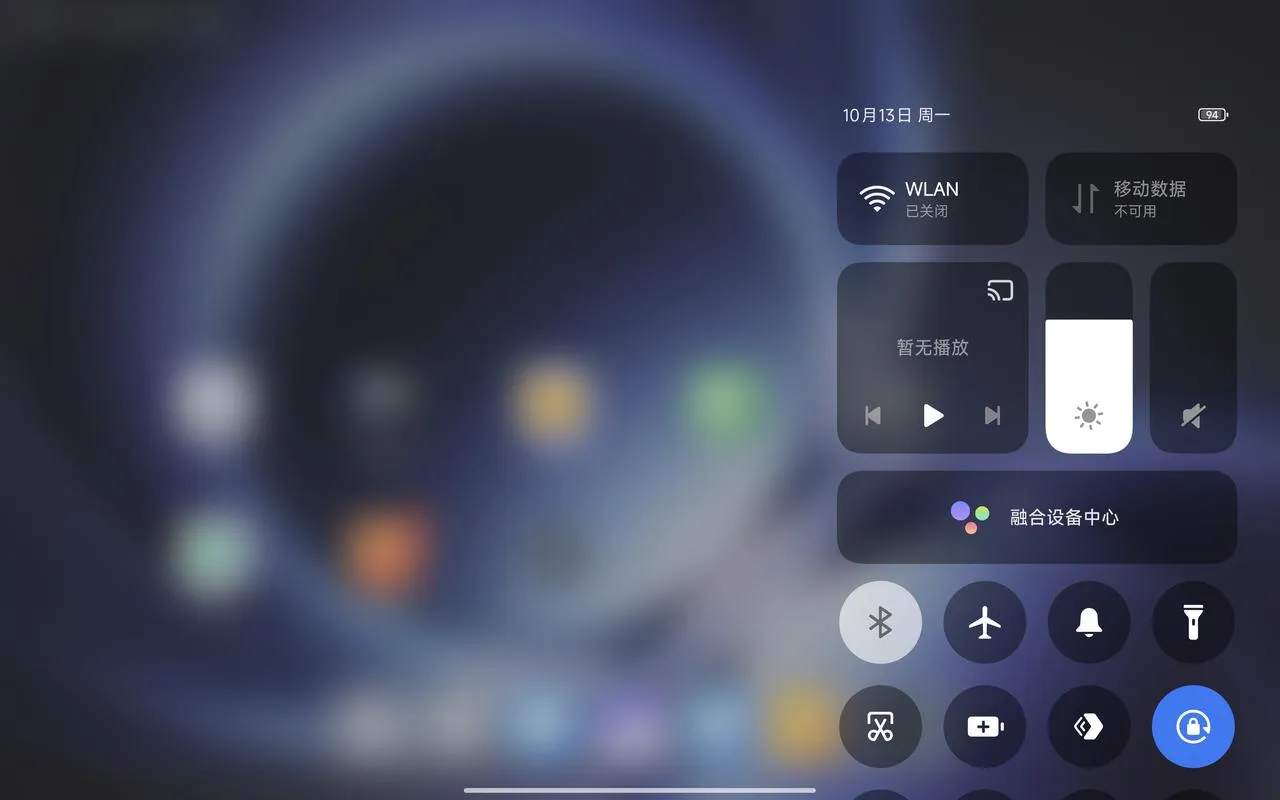
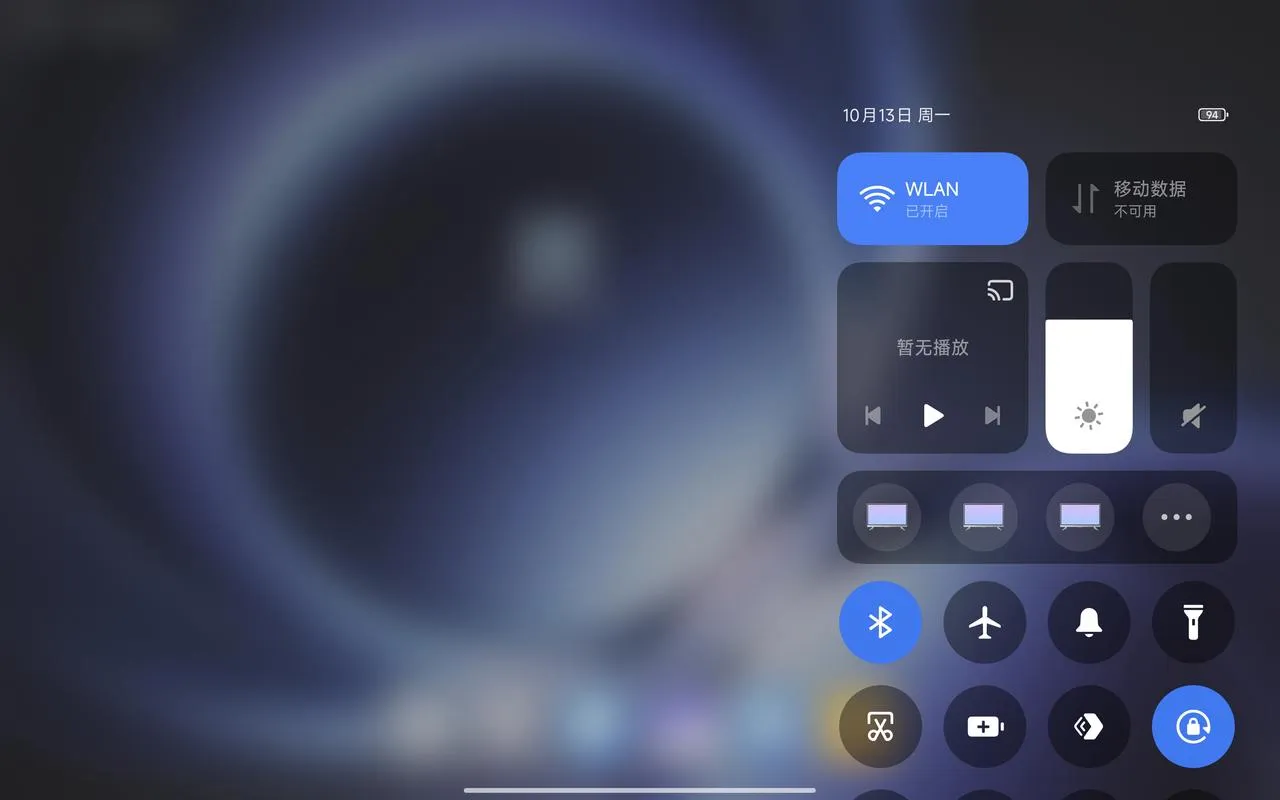
第十六步
待平板电脑启动后,进入手持终端系统桌面,确保 WIFI & 蓝牙处于打开状态;
 |  |
|---|
第十七步
平板通过 WIFI 设置连接机器人自带 WIFI 热点 MOZ1-0900x,默认密码 spirit-ai; 
第十八步
点击操作手柄右下角的配对按钮 Home 键,实现操作手柄与平板的连接,连接成功后,手持终端上方状态栏显示蓝牙连接图标; 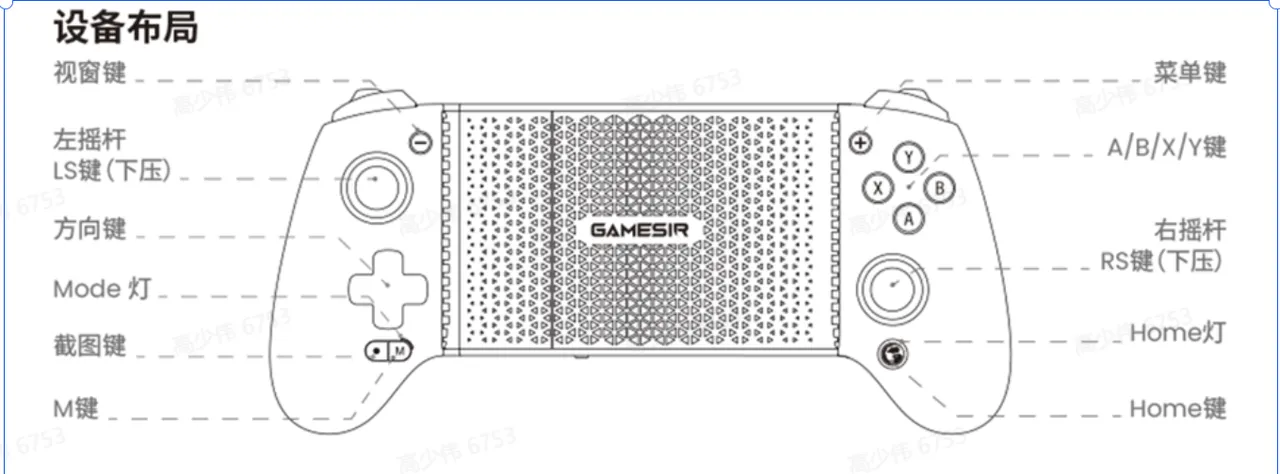
 |  |
|---|
第十九步
启动桌面应用程序 “SpiritAI MovaX”,等待界面启动;
 |  |
|---|
第二十步
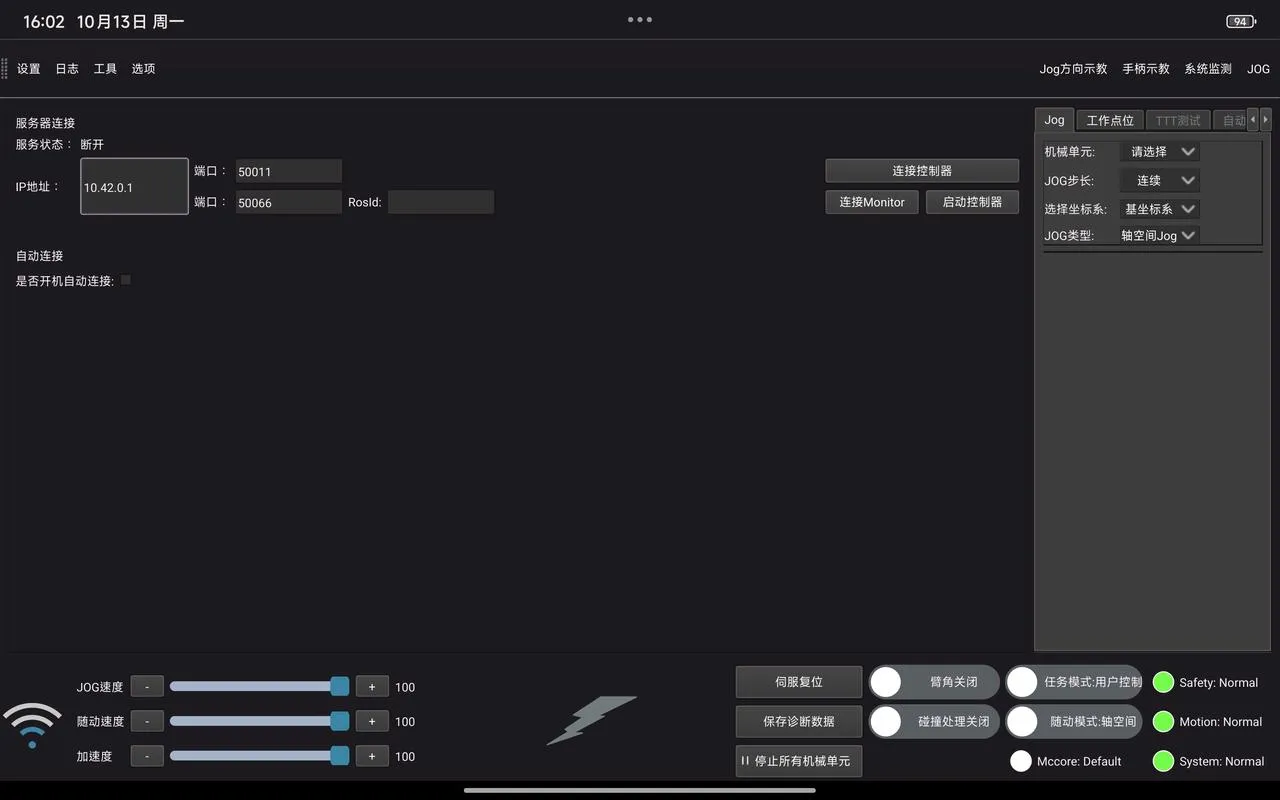
在界面中点击连接 Monitor,界面提示 Monitor 连接成功后点击连接控制器; 
第二十一步
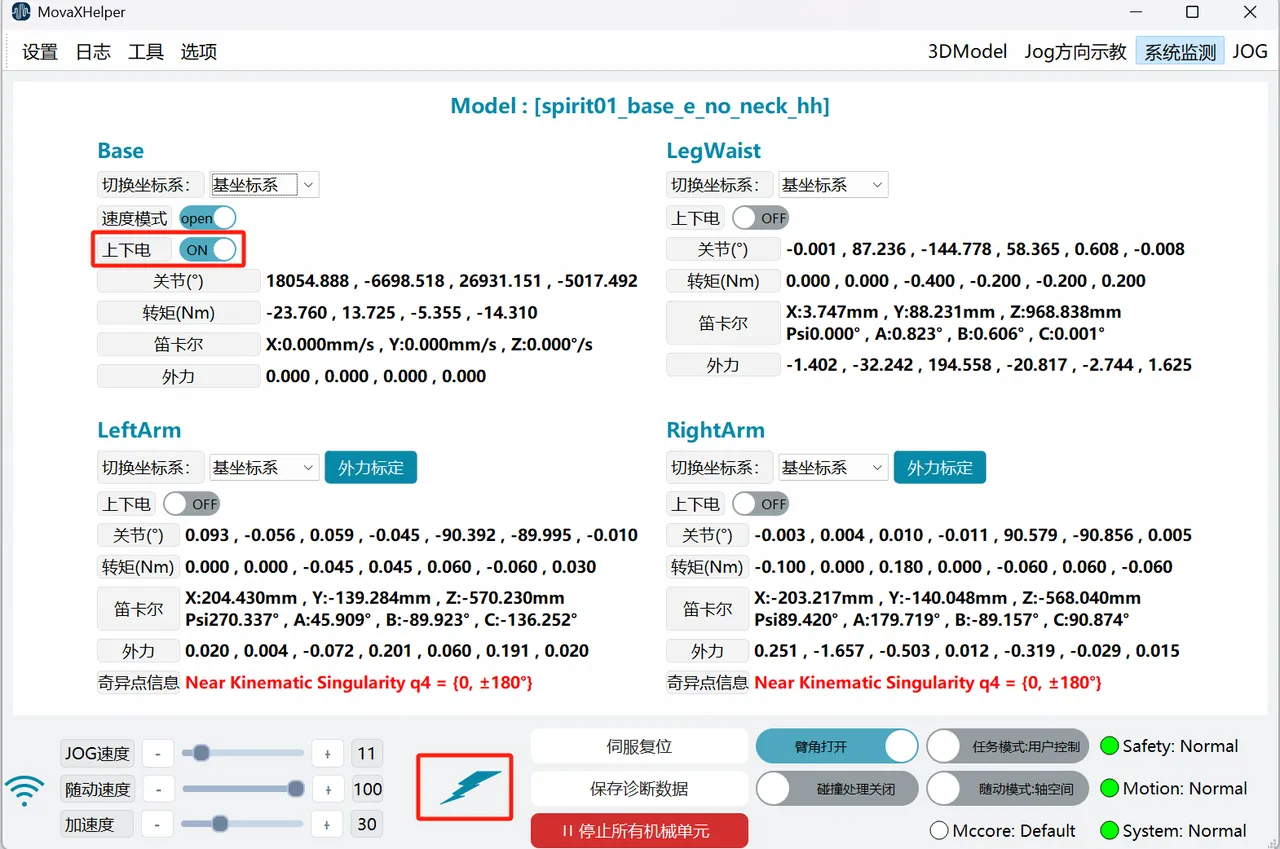
连接成功后,打开“系统监测界面”,在页面左上角“Base”面板上,打开“速度模式”和“上下电”,此时可听到抱闸释放的声音。上电后界面如右图所示; 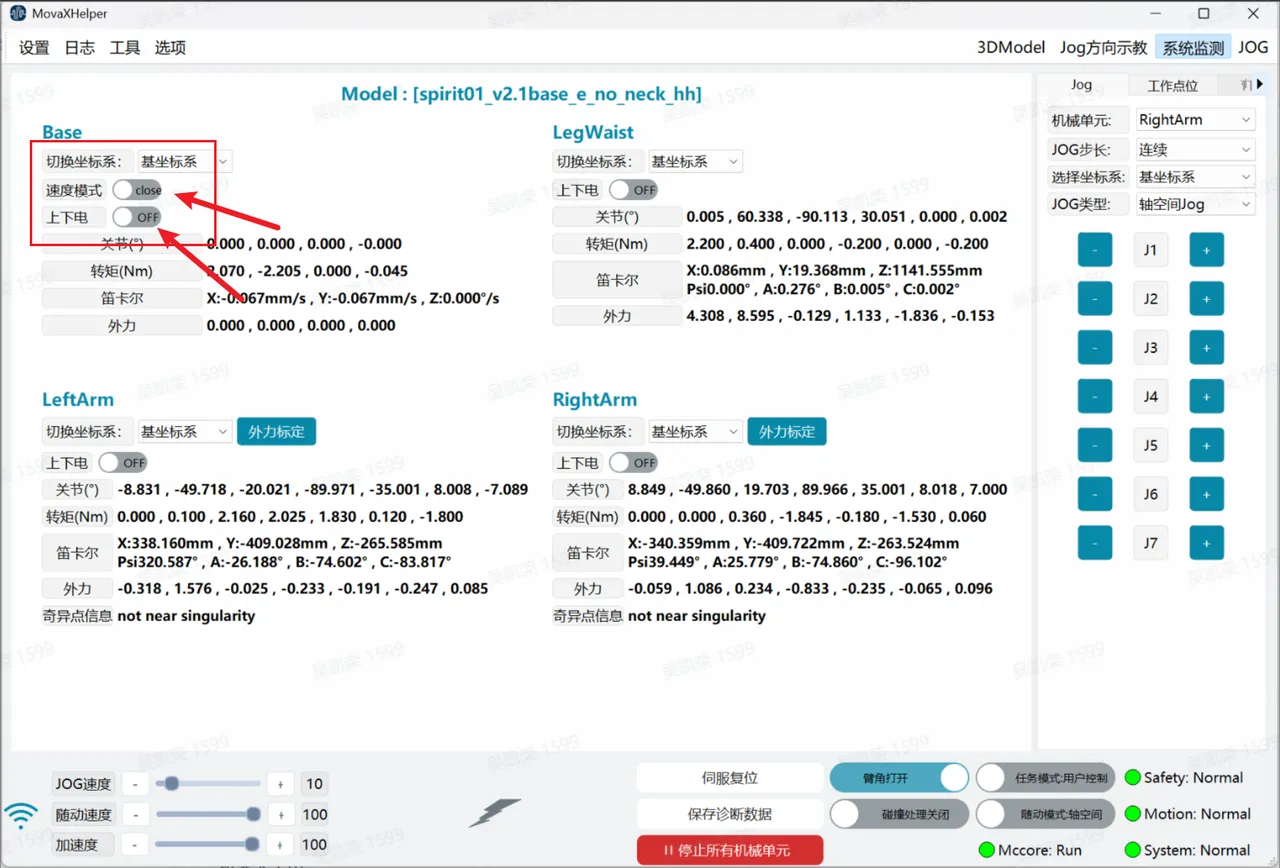
第二十二步
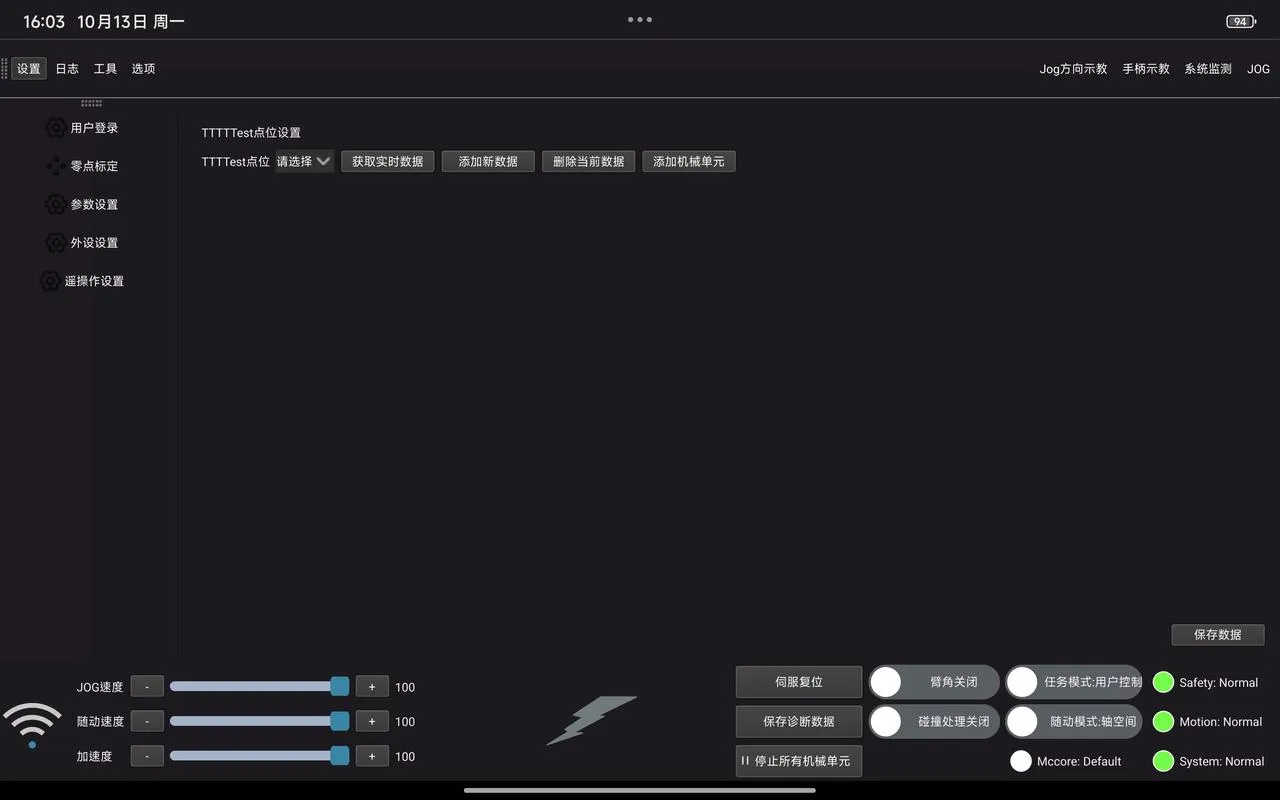
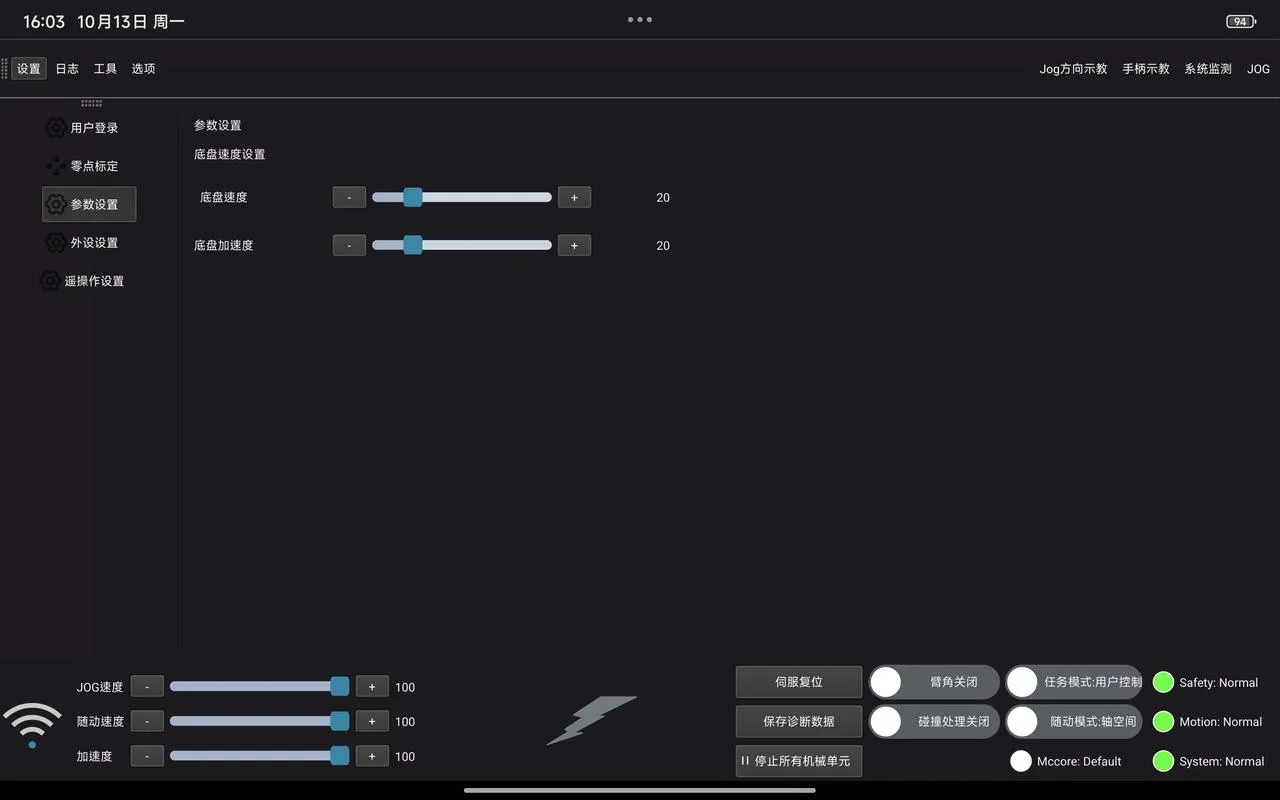
为了确保安全,需要设置底盘速度、加速度为较小的值,点击左上角设置,进入参数设置页面,确认速度值为10,加速度为10;
第二十三步
进入底盘控制模式,通过操作手柄控制底盘,手柄组合键为 左侧摇杆+ 按键A进行控制(下图为手柄按键功能指引),注意在箱体内只能朝后运动,否则与箱子发生碰撞;初次使用时,建议轻推手柄摇杆;

第二十四步
将机器人身上的塑料膜收起到底盘以上区域,并做适当捆扎;之后控制底盘后退,通过打开的斜坡缓慢离开航空箱;首次使用建议缓慢操作,边观察边调整;


第二十五步
此时通过手持终端界面,将机器人底盘下电,可听到底盘抱闸抱紧的声音; 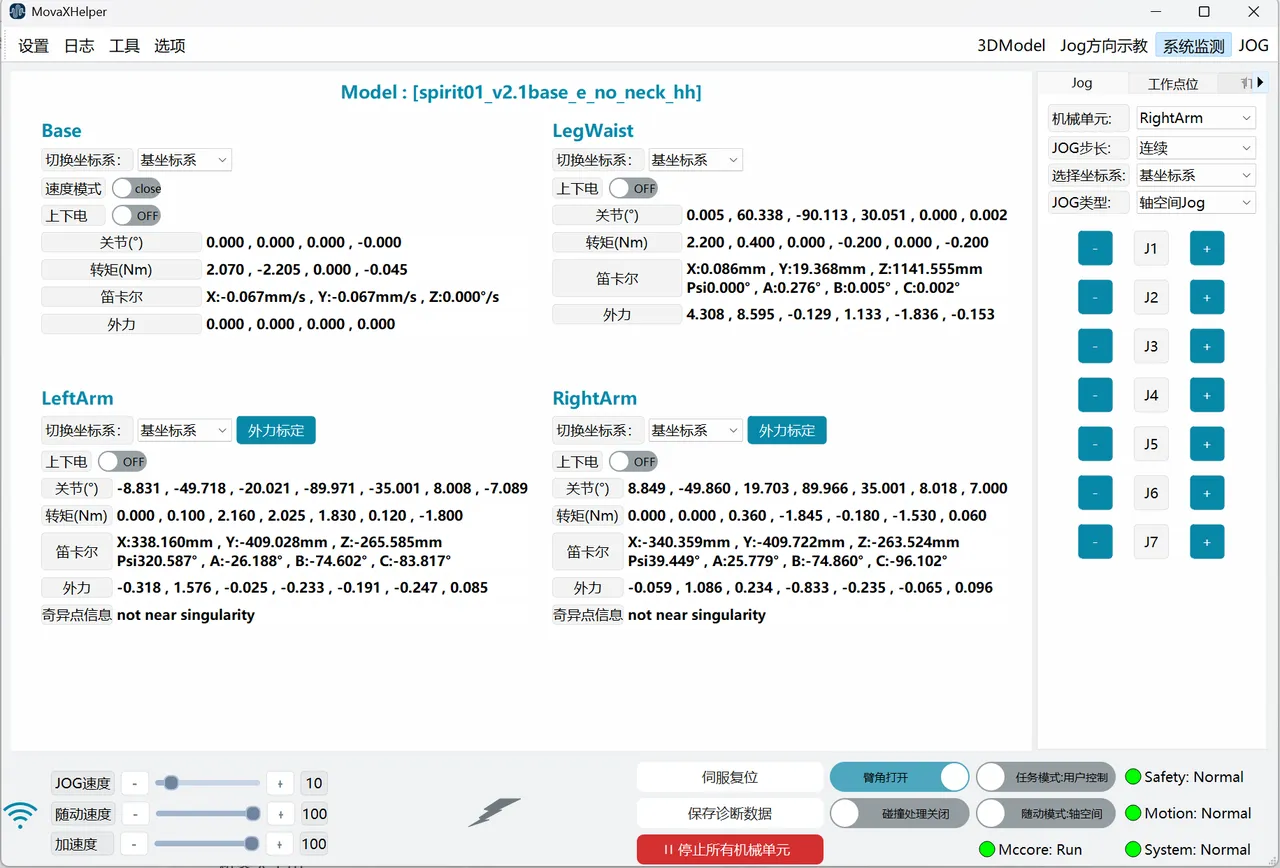
第二十六步
从上方移除机器人身上罩着的塑料套膜,并取出机器人腰部的缓冲泡沫;
 |  |  |
|---|
第二十七步
完成上述操作后,绕行机器人一圈对机器人外观进行观察,查看运输过程中是否存在不良运输导致的损伤情况;
至此,机器人开箱步骤已经结束,请阅读 Moz 机器人快速开始,开启你的 Moz 探索之旅吧!