快速开始
设备连接
设备列表
外部控制模式设备(之后以遥操简称)包括Quest VR头显、VR手柄*2、以及连接电脑到机器人运控单元的数据线。
软件设备包括MovaXHelper;注意仅遥操不需要Capture-X(数据采集软件)。
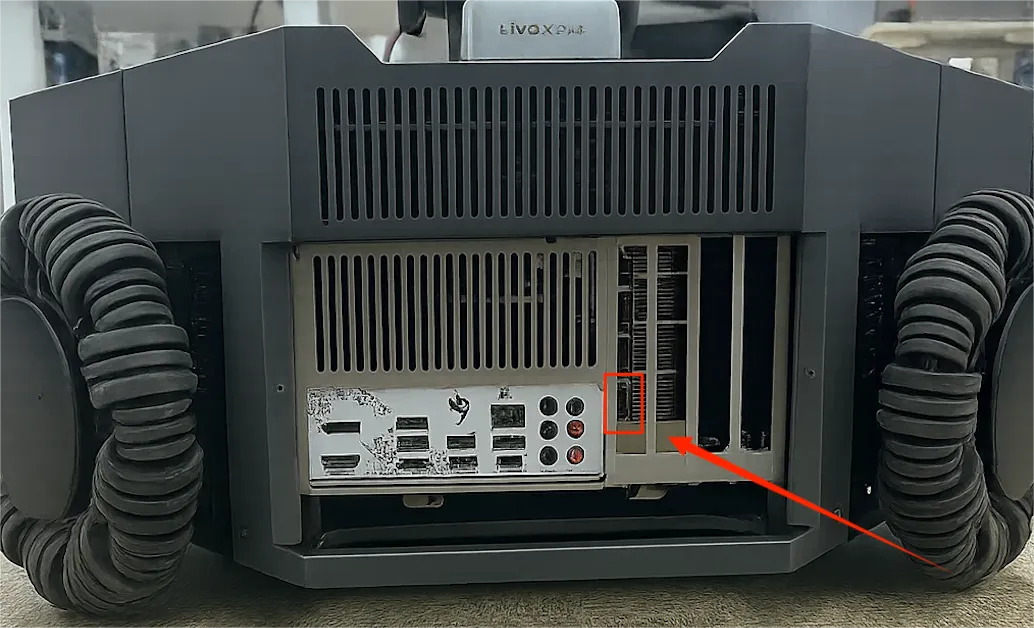
电脑连接运控单元(如下图,CAT6接口),VR头显连接下图USB接口后,开启VR设备(开机键位于头显左侧)。

打开外部盖,连接显示器(如下两张图)

设备启动和连接
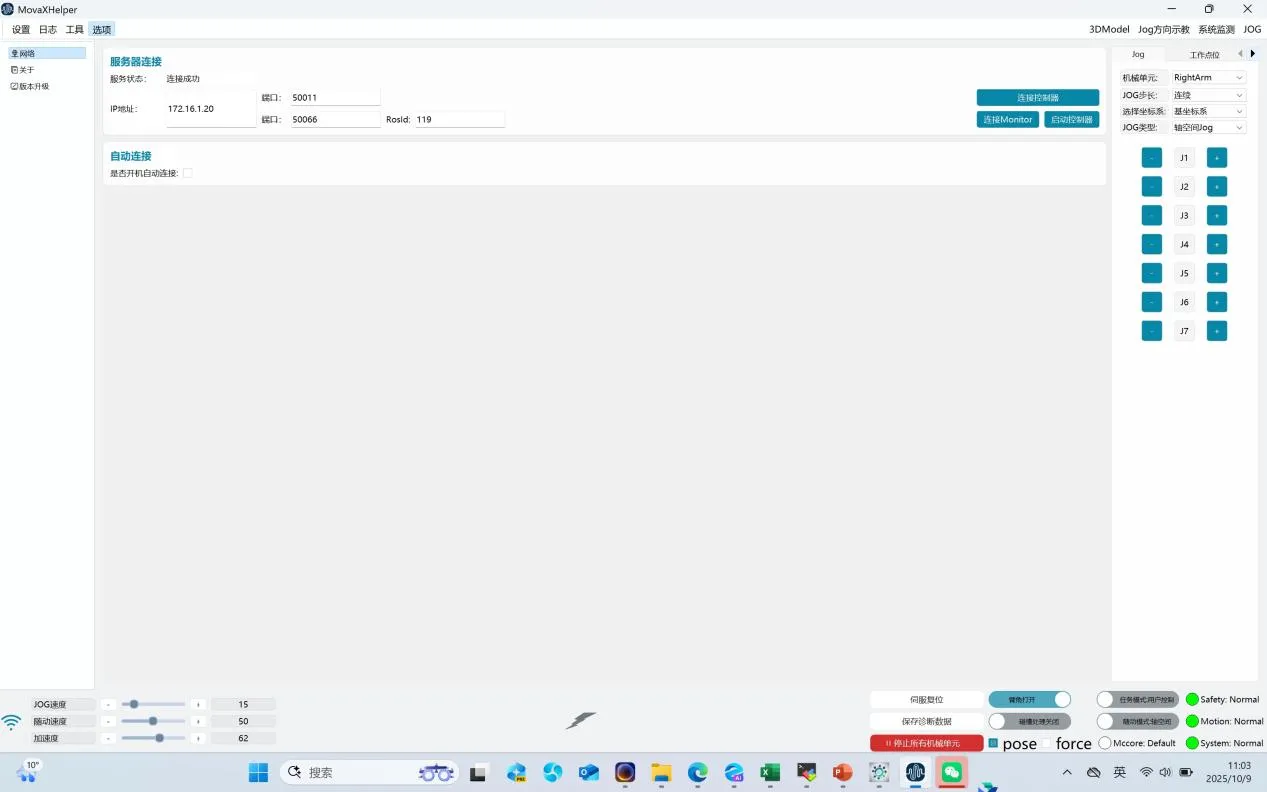
- 启动MovaXHelper进入【选项】-【网络】界面。默认有线连接IP地址:172.16.1.20;无线通过默认分配热点连接,热点名:Moz1-0900x(例如设备1为 Moz-09001)。
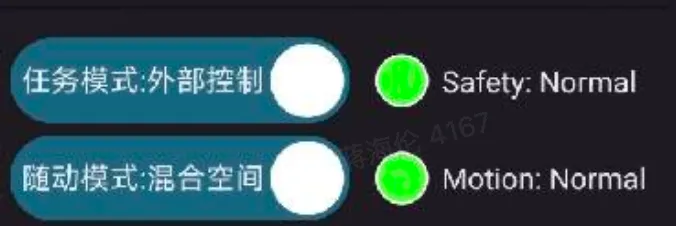
RosId设置默认33,需要和第二步中设置页面遥操作配置保持一致。同时需打开右下角【任务模式:外部控制】或【任务模式:用户控制】。
 |  |
|---|
- 进入【设置】页面进行遥操作配置。
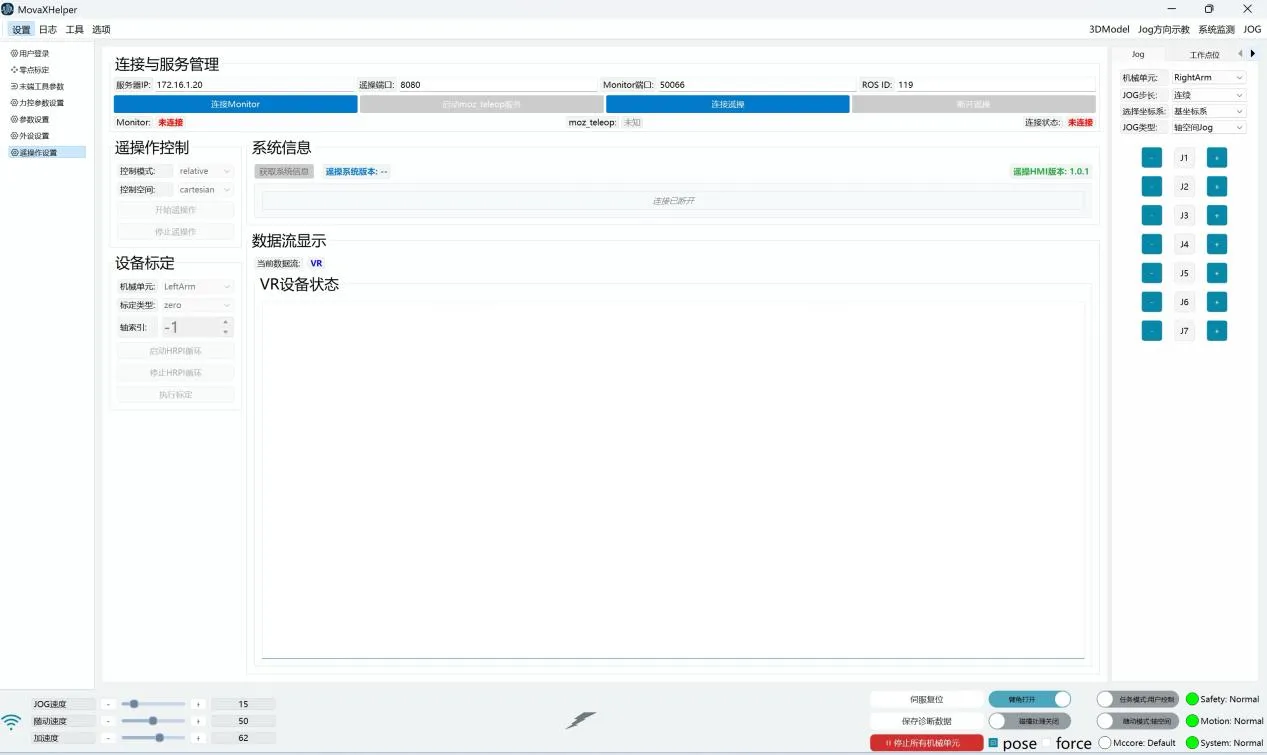
检查服务器IP和RosId设置是否与第一步保持一致。按从做到有顺序点击【连接Monitor】 ->【启动moz_teleop服务】->【连接遥操】。启动moz_teleop服务根据连接情况需要等待10s左右。
连接成功后状态显示已连接字样: 

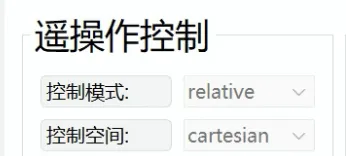
- (默认)在遥操作控制栏中选择Relative和Cartesian
- 检查VR设备连接:连接遥操后,VR头显默认显示绿色屏幕为启动成功。
启动成功后点击VR左手柄菜单键(下图红框)按钮开启遥操。

- 机器人上电:进入【系统检测】界面,选择需要上电的模块,例如左臂、右臂、腰腿。
DANGER
注意1:  下发闪电按钮为快捷上电,不推荐首次操作使用。
下发闪电按钮为快捷上电,不推荐首次操作使用。
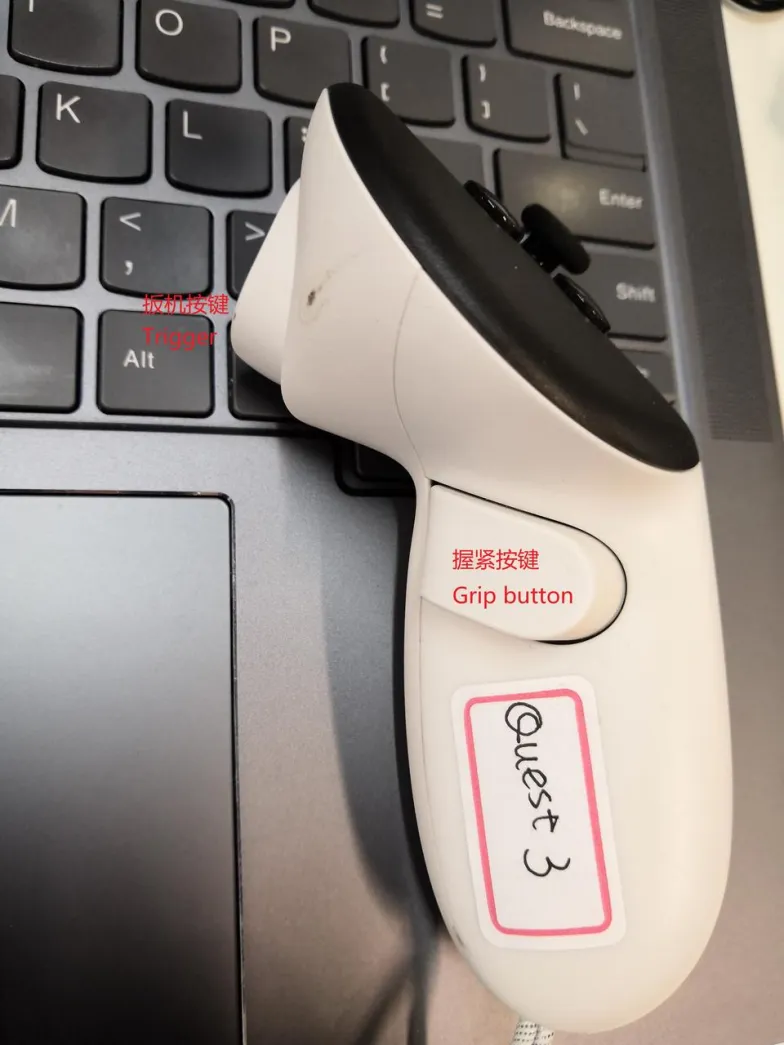
手柄功能键
左手柄:
- 菜单键(Menu):启动VR遥操
- X键:腰腿跟随键;长按该键,机器人腰腿随头显运动,松开后停止
- Y键:左臂复位键,推荐在每个动作完成后保证周围安全的情况下复位
- 左扳机键(Trigger):左臂随动键,长按该键,左臂跟随运动
- 左握紧键(Grip):左夹爪闭合键,握紧即闭合,松开即张爪
右手柄:
- 系统键:VR页面中Quest系统键;系统接管,可进入VR页面调试
- A键:腰腿复位键
- B键:右臂复位键
- 右扳机键(Trigger):右臂随动键,长按该键,右臂跟随运动
- 右握紧按键(Grip):右夹爪闭合键,握紧即闭爪,松开即张爪
- 拇指摇杆(Thumbstick):底盘轮前后左右移动键

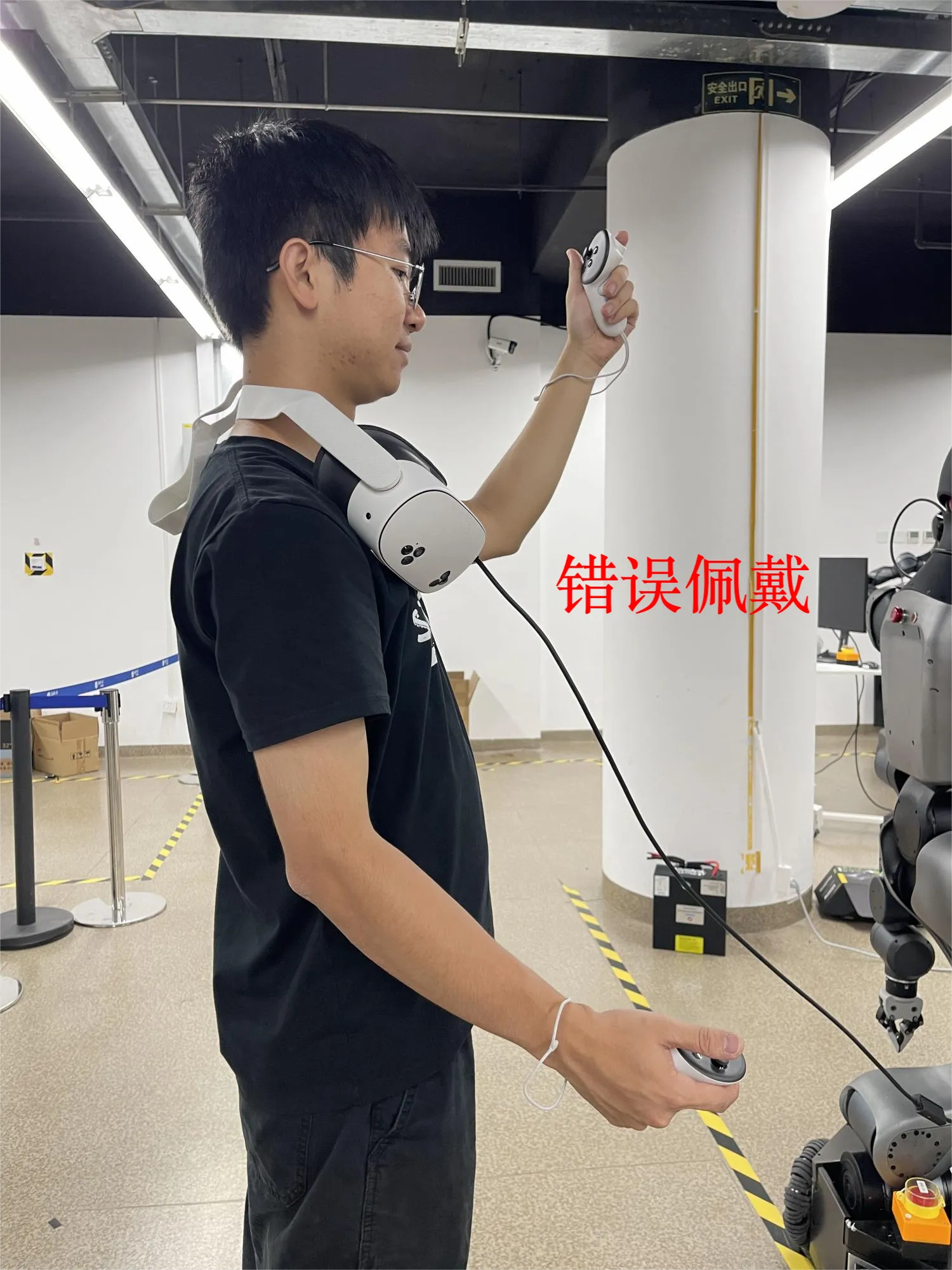
VR佩戴示范
正确佩戴方式需要VR设备垂直于头部(图1),错误佩戴VR设备与头部不垂直(图2)。
遥操作时手柄需要低于头显(图1),高于头显遥操将失效(图2)。

安全注意事项
每次遥操作后建议复位;复位前请检查初始位置是否有阻挡物。
用户登录
登录
命令行输入HMI,打开数据采集软件
登录界面
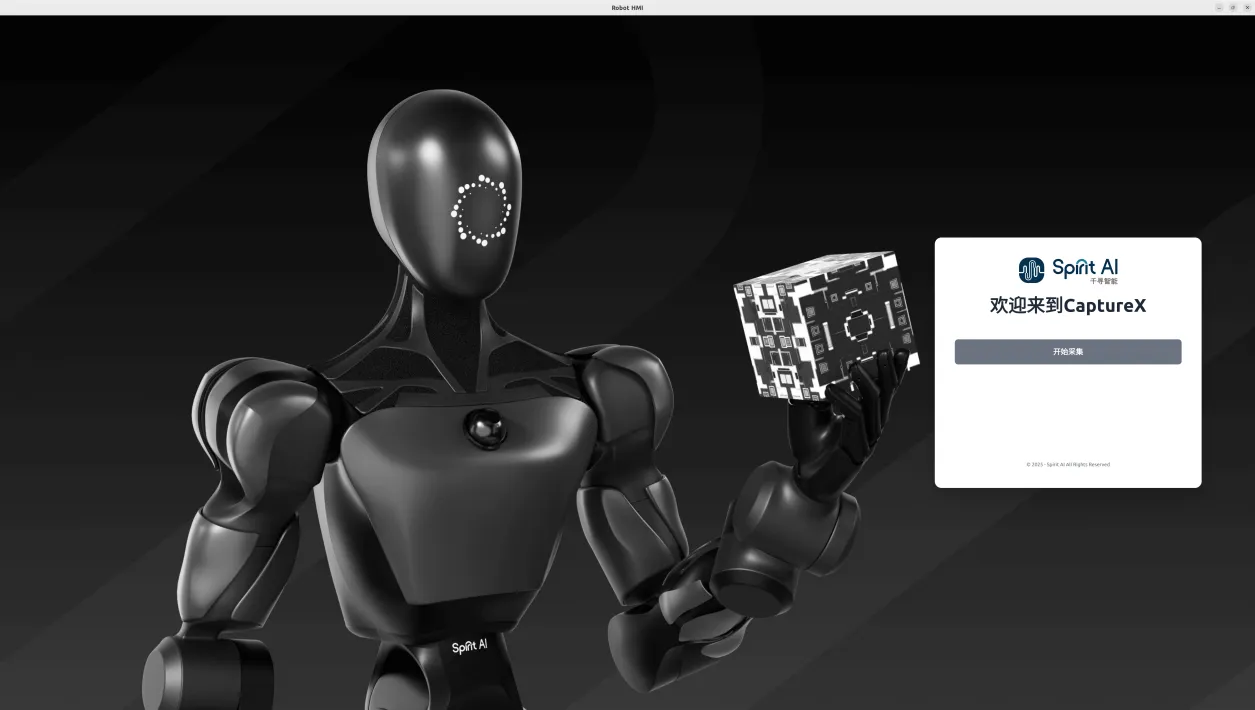
点击开始采集进入采集界面。
登录数采系统功能
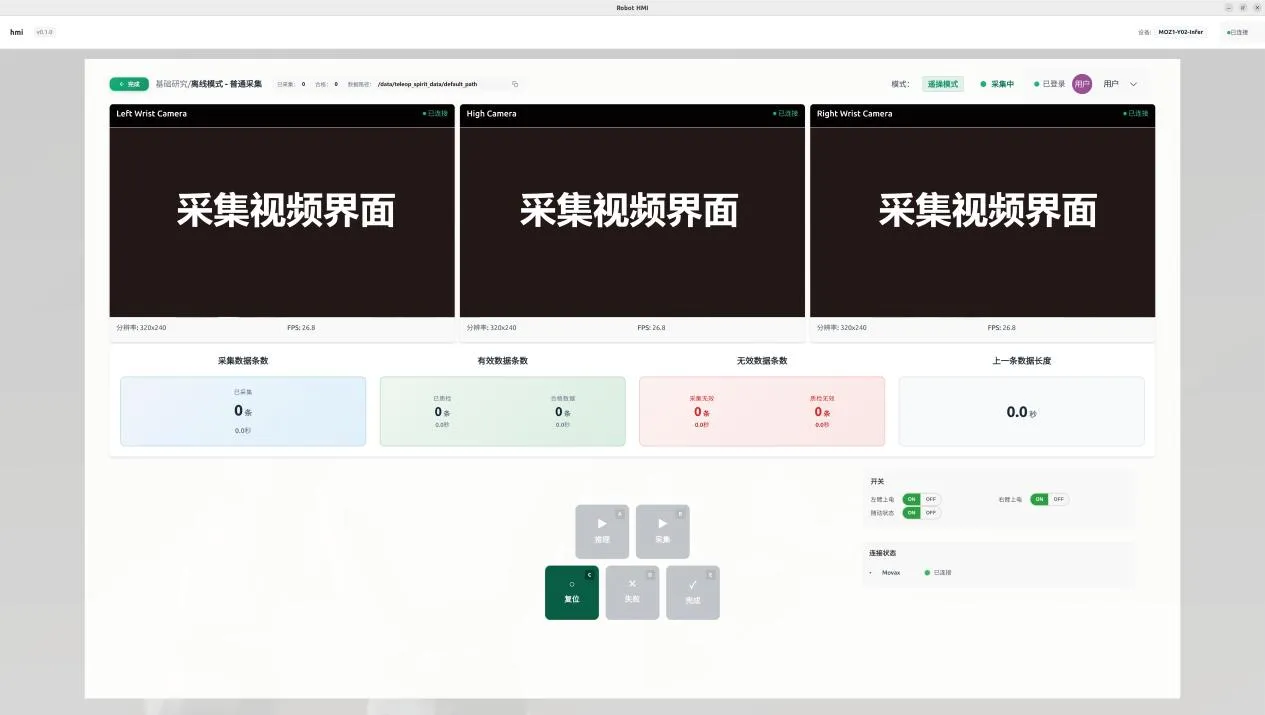
状态和信息显示
设备型号信息
右上角顶部显示设备型号信息,例如MOZ1-xyz。

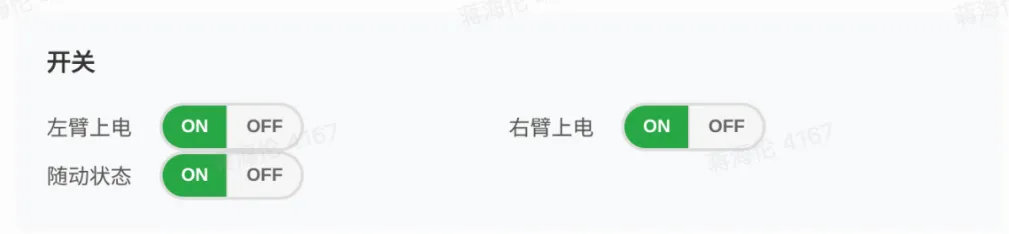
开关状态栏
开关状态栏部分由三个按钮组成,分别控制左臂上下电、右臂上下电和随动状态。遥操时需要开启随动;推理时不建议开启随动(安全考虑);其他时间建议关闭三个开关防止误触遥操手柄。
连接状态栏
链接状态栏显示MovaX的连接状态。 
数据采集功能
文件夹路径
界面左上角展示默认生成的数据路径,支持复制功能。目前版本未支持修改。完成按钮回退到登录页面。

摄像头窗口
分别展示顶部主摄和左右手副摄界面。 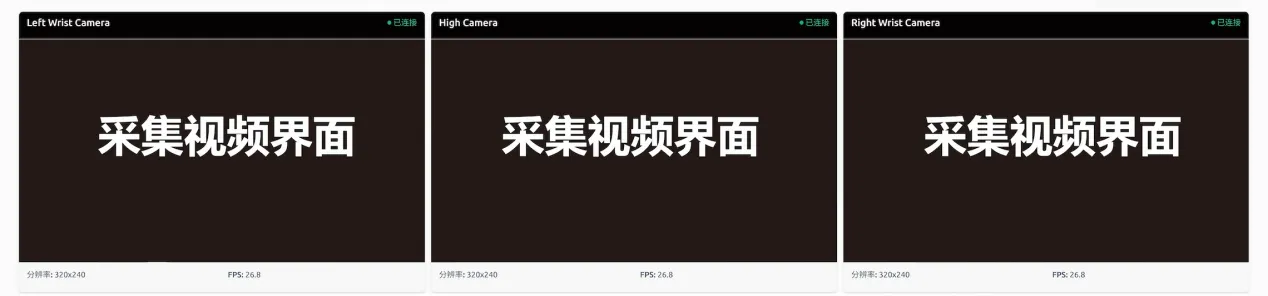
数据信息条和操作记录
展示采集条数

键盘功能区按钮
功能踏板标识
- 推理(对应键盘A键) -- 开启部署模型的推理模式。注意推理和采集模式为互斥关系。
- 采集(对应键盘B键)-- 开始单条数据采集。
- 复位(对应键盘C键)-- 机器人恢复初始位姿。需要先点击复位,再点击采集,以确保安全性和数据质量。
- 失败(对应键盘D键)-- 放弃本条数据。
- 完成(对应键盘E键)-- 完成并记录本条数据。
