手柄及平板使用指南
手柄配置
- 产品型号:盖世小鸡 G8+ 手柄
- 配套设备:红米 8.8 英寸小米安卓平板(用于HMI界面显示与控制)
免责声明
本使用指南仅供用户使用手柄操作机器人,不构成任何法律或技术承诺。用户在使用盖世小鸡 G8+ 手柄及配套红米 8.8 英寸安卓平板进行机器人操作时,应仔细阅读配套之《千寻智能Moz1 用户手册》。千寻智能对因误操作、设备故障或第三方原因导致的设备损坏、人身伤害或数据损失不承担直接或间接责任。
本手柄与平板系统仅适用于Moz 1机器人平台的本地控制与监控场景,禁止用于非授权、非官方的工业或娱乐用途。
建议在专业技术人员指导下进行操作,确保操作安全、合规。
安全说明
- 禁止在无人看管的情况下操作机器人,尤其在自动回零、高速运动或上下电模式下。
- 操作前请确认机器人处于安全状态,工作区域无人员、障碍物或易燃物品。
- 严禁在高电压、潮湿、高温或易燃环境中使用本手柄。
- 手柄上的“上下电”组合键(如 RT+LT+A)会触发所有机械单元上电,操作时请确认机器人已脱离危险区域,同时工作区域无人。
- 若发现手柄异常发热、按键失灵、屏幕无响应,请立即停止使用并联系客服。
- 本手柄不支持远程控制或网络操作,所有控制均为本地实时反馈,操作者需全程关注状态。
- 使用手柄时无线急停需放置于操作员易于触达的位置,随时注意使用安全。
- 平板设备(红米 8.8 英寸)用于显示机器人状态、路径、参数等信息,也支持触摸屏直接控制,可以脱离手柄独立工作。
- 使用平板设备独立控制时,请完全确认手柄断电。
产品概述
盖世小鸡 G8+ 手柄与红米 8.8 英寸小米安卓平板协同使用,配合千寻机器人操作软件 MovaXHelper HMI,是一款专为Moz 1机器人设计的高性能操作手柄,支持本地控制与HMI可视化监控,实现人机交互、状态监控与实时反馈。
- 手柄支持用户控制模式与外部控制模式(VR/远程)
- 平板用于显示机器人状态、路径轨迹、参数设定、报警信息等,也可以完全实现手柄的所有功能。
- 手柄具备多自由度按键,支持加速度、速度、方向、关节运动等精细控制。
- 配备一键回零、紧急停止、上下电控制等功能,提升操作安全性与效率。
简介
本系统由 G8+ 手柄 + 红米 8.8英寸安卓平板 组成,通过蓝牙连接,实现手柄控制与平板显示的联动。 手柄负责执行运动指令,平板用于实时显示机器人状态、位置、运行日志等信息,便于用户监控与调试。 平板独立使用时,可以通过触摸按键实现全功能操作机器人。
模式说明:
| 模式 | 说明 |
|---|---|
| 任务模式:用户控制(默认) | 通过手柄直接控制机器人运动,平板实时显示当前状态、速度、位置等参数。 |
| 任务模式:外部控制(VR/远程) | 需配合VR头显或远程设备使用,手柄作为输入设备,通过系统传输指令,适用于远程巡检、教学等场景。 |
连接与使用平板
请仔细阅读平板与手柄配套使用说明,开机使用。随千寻Moz 1机器人出厂时,平板已经与手柄完成配对,经过测试,可直接使用,使用时请保持平板蓝牙开启。
快速开始:
- 将平板开机,打开 SpiritAI MovaX(MovaX的使用,请参考千寻智能 Moz 1机器人用户手册第8章HMI简介)

- 拉开手柄,将平板放入手柄,手柄会自动开机
- 开始使用
使用方法
默认操作模式
- 手柄默认进入 用户控制模式,可直接操作机器人运动。
- 操作时,平板将实时同步显示机器人状态变化。
- 外部控制模式(VR/远程)模式下,手柄不生效
- 打开MovaX 后,点击“手柄示教”会显示手柄快捷键

6.2 常用功能操作(手柄控制)
| 操作 | 说明 |
|---|---|
| ↑↓ | 加速度调节,可与 A/B/X/Y 键联动使用 |
| ←→ | 速度调节,可与 A/B/X/Y 键联动使用 |
| A + ↑ | 底盘加速度增加 |
| A + ↓ | 底盘加速度减少 |
| A + → | 底盘速度增加 |
| A + ← | 底盘速度减少 |
| Y/B/X + → | 底盘/左臂/右臂 增加速度 |
| Y/B/X + ← | 底盘/左臂/右臂 减小速度 |
| Y/B/X + ↑ | 底盘/左臂/右臂 增加加速度 |
| Y/B/X + ↓ | 底盘/左臂/右臂 减小加速度 |
| A + LS + LT | 底盘自转(顺/逆时针) |
| A + LS | 底盘前后左右移动(精确控制) |
| X + LS | 左臂笛卡尔运动(前后左右) |
| B + LS | 右臂笛卡尔运动(前后左右) |
| Y + LS | 腰腿笛卡尔运动(前后左右) |
| LT + RT + LS↓ + RS↓ | 回到装机位姿(默认位) |
| LT + RT + LS↑ + RS↑ 一键回到 HOME 位(可自定义) |
6.3 多功能组合键(上下电控制)
| 组合键 | 功能说明 |
|---|---|
| RB + LB | 所有机械单元上电(底盘、左臂、右臂、腰腿) |
| RT + LT + A | 底盘上下电(同时激活速度模式) |
| RT + LT + X | 左臂上下电 |
| RT + LT + B | 右臂上下电 |
| RT + LT + Y | 腰腿上下电 |
| A/B/X/Y 四个键中任意三个键同时按下(A+B+X 或 A +B +Y 或 B+X+Y 或 A+X+Y) | 停止运行并下电(安全退出) |
⚠️ 说明:所有“上下电”操作必须在机器人静止、无负载、无人员接触情况下执行,防止意外启动。
如何充电
- 使用附带的 USB-C 充电线(推荐使用原装线材)连接手柄与电源。
- 将充电线插入 USB-C 接口,连接至电脑、电源适配器或支持 USB-C 充电的移动电源。
- 建议每次使用前检查电量,电量低于 20% 时应及时充电,避免设备突然断电。
- 充电时间约 1.5 小时(视使用环境略有差异)。
- 禁止使用非原装充电器或第三方电源,以免损坏内部电路。
- 关于手柄充电补充:
- 手柄拉伸状态下只对右电池充电。
- 手柄合起状态下对左右电池充电。
- 手柄处于充电状态下左右合起不会自动关机。
- 充电模式下Mode灯呼吸指示当前电池电量。
故障描述
| 故障现象 | 可能原因 | 解决方案 |
|---|---|---|
| 手柄无响应 | 1.电池耗尽 2.手柄长时间不使用进入待机模式" | 1. 检查充电线连接,尝试充电;若仍无效,联系售后 2. 摁下手柄home键,解除待机模式" |
| 按键失灵 | 1. 按键被污垢覆盖 2. 软件卡顿 3. 手柄设置了连发功能 | 1. 用干燥软布清洁按键;重启手柄或重启机器人系统 2. 双击M键 清除连发设置" |
| 无法连接平板 | 1. 未打开蓝牙 2. 手柄未配对 | 检查蓝牙是否开启,重启设备后重试 |
| 速度/加速度无法调节 | 1. 按键误触 2. 信号延迟 | 重新确认按键组合,检查手柄与平板连接稳定性 |
| 一键回零失败 | 1. 机器人未连接 2. HOME位未正确设置 | 检查机器人连接状态,检查机器人IP地址,进入系统设置中重新配置HOME位 |
| 平板显示黑屏或无响应 | 1. 平板系统卡死 2. 网络中断" 重启平板,检查Wi-Fi连接 | |
| 手柄与平板连接断开 | 1. 蓝牙信号弱 2. 位置距离过远 | 将设备靠近(≤3米),确保无遮挡;尝试重新配对 |
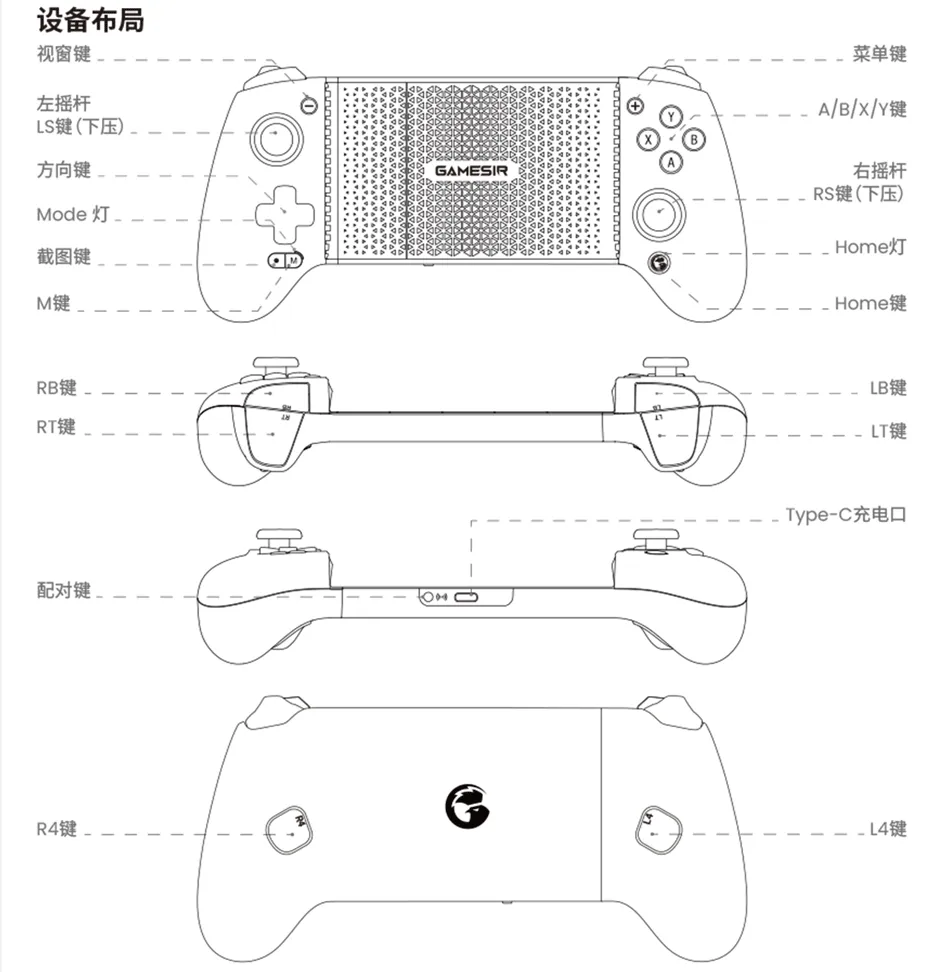
附录1:手柄按键分布图: