交互界面
MovaXHelper软件简介
MovaXHelper是 Mccore 控制系统的上位机软件,具有机器人移动控制、任务编辑、参数设置、 状态监控等功能。该软件可安装于 PC、Pad上,只要与机器人处于同一网 段内,连接机器人便可操控机器人。
HMI整体布局
 操作主界面通常由 4 个主要区域构成,包括:顶部状态栏、底部状态栏、左侧边栏、右侧操控面板。
操作主界面通常由 4 个主要区域构成,包括:顶部状态栏、底部状态栏、左侧边栏、右侧操控面板。
顶部状态栏
顶部状态栏,包含:若干一级菜单按钮(设置、日志、选项)、3DModel按钮、Jog方向示教按钮、系统监测按钮、JOG面板按钮。
| 状态栏 | 图片指示 | 说明 |
|---|---|---|
| 设置、日志、选项 | 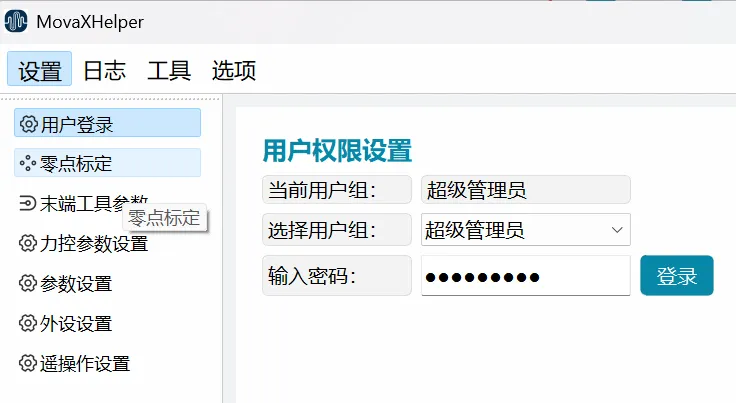 | 一级菜单按钮,包含设置、日志、选项等若干一级菜单 按钮,点击可跳转到功能子界面。 |
| 3DModel | 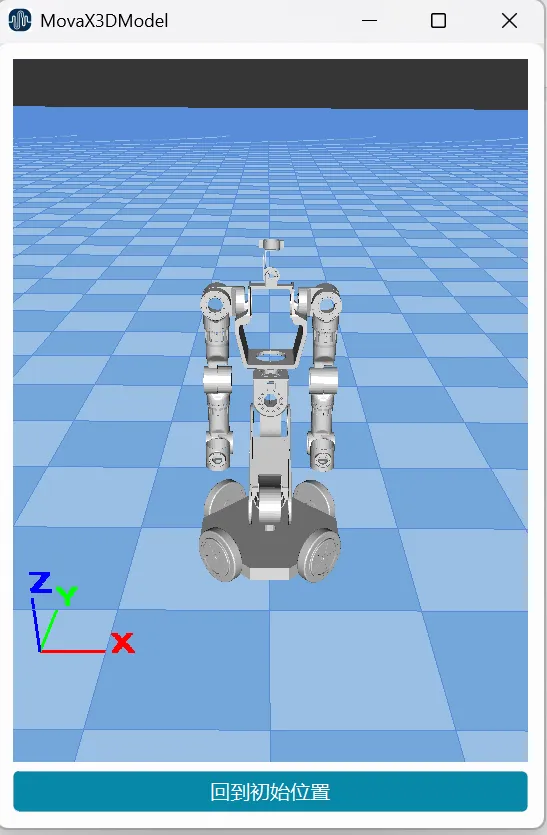 | 3D模型显示按钮,点击可打开、关闭展示面板;该界面以三维模型的方式直观展示机器人当前状态,三维模型可以通过点击拖动的方式切换观 察视角,也可以通过点击“回到初始位置“”按钮让模型回归默认视角。 |
| Jog方向示教 | 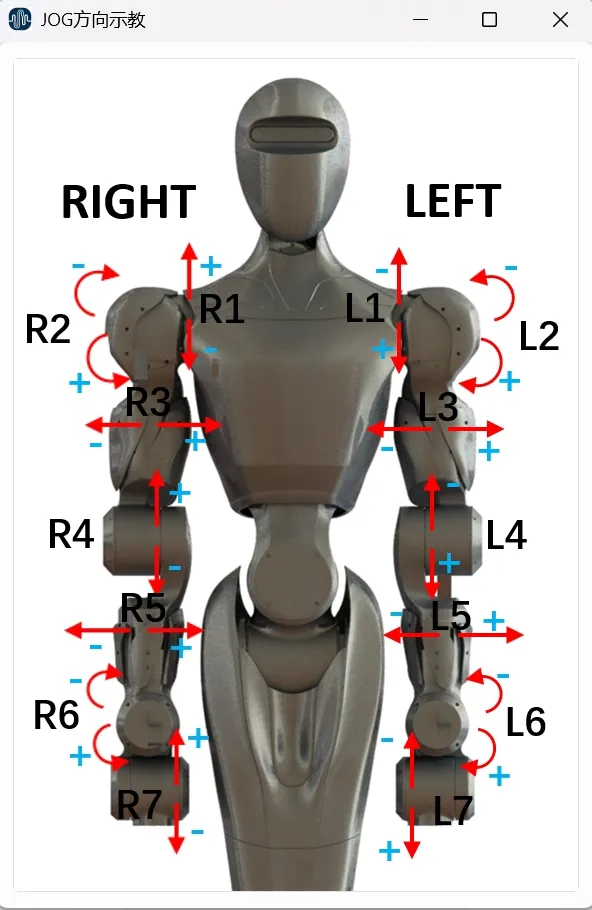 | Jog方向示教显示按钮,展示各关节“+”“-”转动方向,辅助进行Jog操作;点击可打开、关闭展示面板。 |
| 系统监测 | 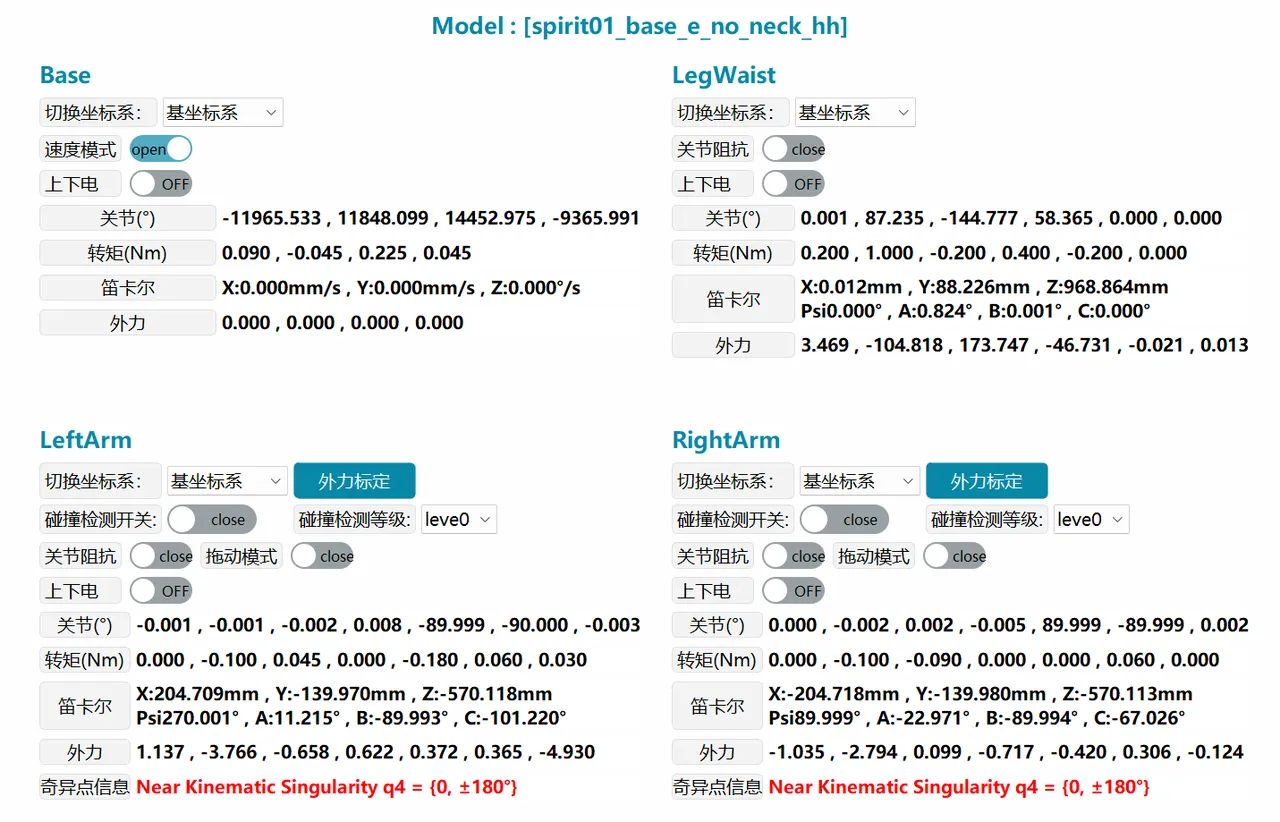 | 系统监测入口按钮,实时显示机器人当前上下电、位姿、受力等状态,点击可打开、关闭操控面板。 |
| JOG面板按钮 | 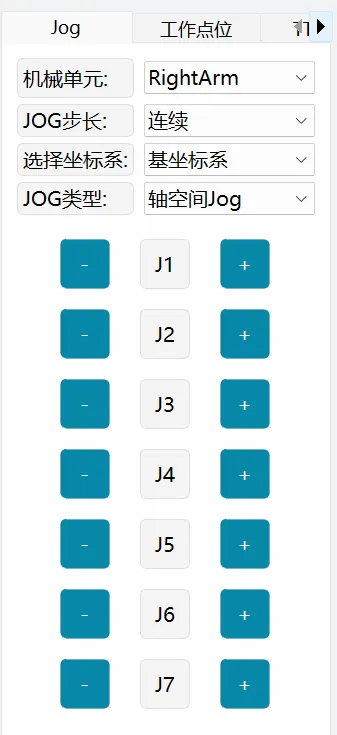 | JOG面板入口按钮,点击可打开、关闭操控面板。 |
左侧边栏
 当通过顶部状态栏切换不同的功能,例如设置、工具等,左侧边栏会显示相应功能的子菜单。 如上图所示,在顶部状态栏点击“设置”,左侧边栏显示所 有“设置”子菜单。点击“零点标定”,进入“零点标定”设置页面。
当通过顶部状态栏切换不同的功能,例如设置、工具等,左侧边栏会显示相应功能的子菜单。 如上图所示,在顶部状态栏点击“设置”,左侧边栏显示所 有“设置”子菜单。点击“零点标定”,进入“零点标定”设置页面。
右侧操控面板
点击顶部状态栏的JOG按钮,可打开右侧操控面板,操控面板用于对机器人进行移动控制、自动标定等。
| 状态栏 | 图片指示 | 说明 |
|---|---|---|
| Jog | 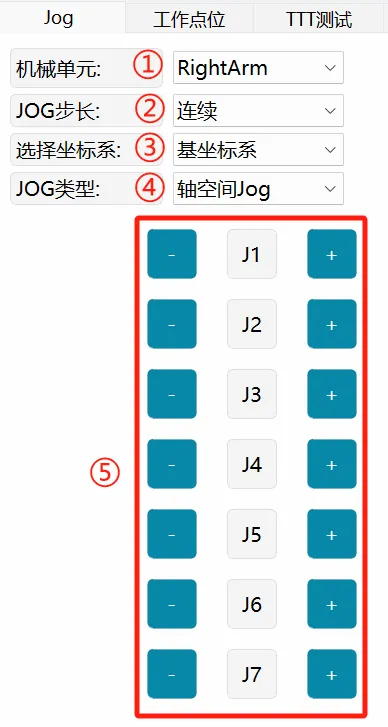 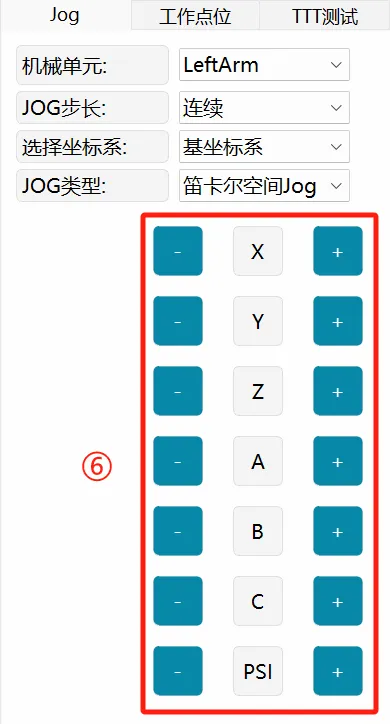 | ①机械单元:选择要进行Jog的机械单元,包括LeftArm(左臂)、RightArm(右臂)、LegWaist(腰腿)和Base(移动平台) ②JOG步长:可选连续Jog和步进Jog,并且可以调整增量步进的大小。 ③选择坐标系:用以选择笛卡尔模式下的参考坐标系,包括:基坐标系、移动平台基坐标系。 ④JOG类型:用来选择Jog时的单轴模式和笛卡尔模式。 ⑤轴空间Jog按钮:轴空间Jog时显示J1~J6/J7(视①中选择机械单元决定)。 ⑥笛卡尔空间Jog按钮:笛卡尔空间 Jog时显示X/Y/Z/A/B/C及PSI。 |
| Jog-移动平台 |  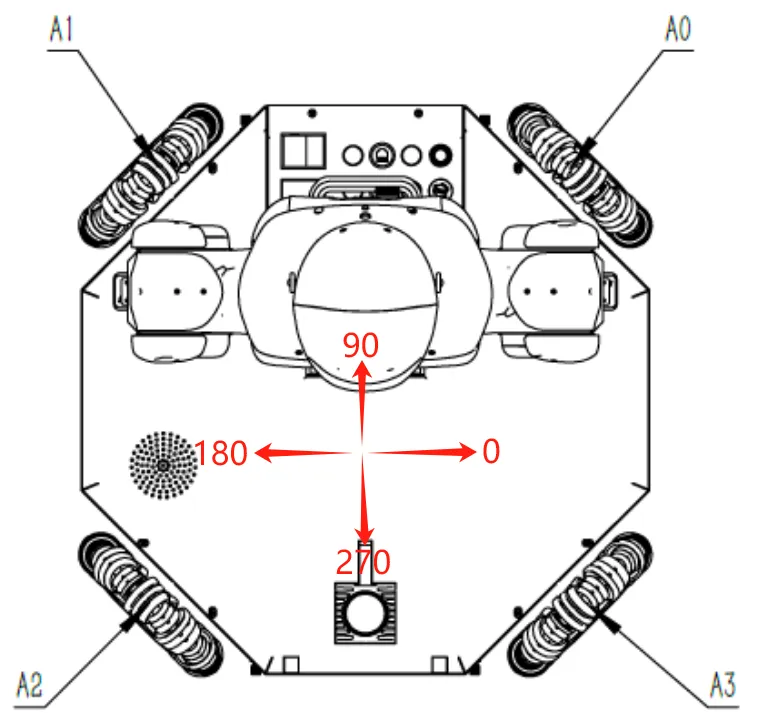 | 移动平台运行速率在“设置-参数设置”进行调节,调整范围1-100%,是相对②④速度限制的百分比。 移动平台JOG仅支持笛卡尔模式。 运动控制:控制移动平台不同方向上直线运行。 ①运动速度:有效范围0-500,单位:mm/s ②运动方向:有效范围0-360,对应运动方向如左侧示意图。 ③运动:点击按钮,移动平台开始运行,松开停止。 旋转控制:控制移动平台在“+”“-”方向进行自转 ④旋转速度:有效范围0-60,单位:°/s ⑤+:移动平台按“0-90-180-270-0”的方向自转 ⑥-:移动平台按“0-270-180-90-0”的方向自转 键盘控制:使用键盘“↑”“↓”“←”“→”键控制移动平台运行 ⑦Enable keyboard control?:勾选本项,即可通过键盘控制移动平台运行: ↑:与②中填入运行方向一致,直线运行 ↓:与②中填入运行方向相反,直线运行 ←:移动平台按“0-90-180-270-0”的方向自转 →:移动平台按“0-270-180-90-0”的方向自转 使用键盘时,需保持鼠标焦点在当前页面。 |
| 工作点位 | 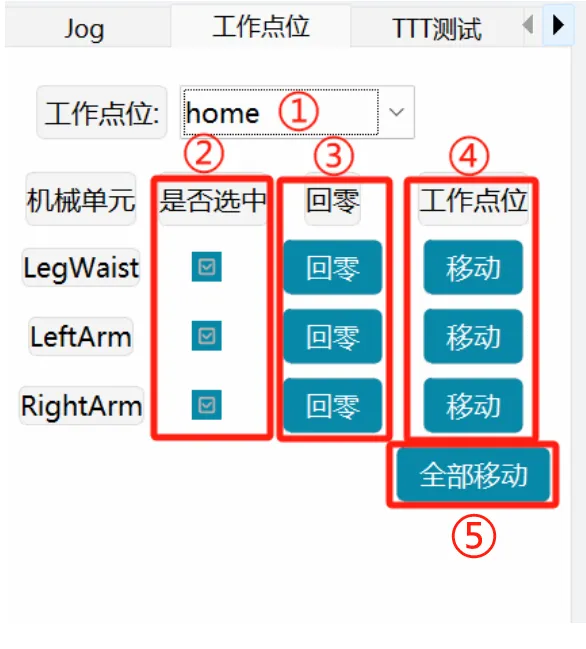 | ①工作点位:选择已建立的工作点位 ②选择机械单元:选择需要移动的机械单元 ③回零:单机械单元各轴回到零点 ④单机械单元移动:单机械单元运动至①中选择的工作点位 ⑤全部移动:②中选择的机械单元运动至①中选择工作点位 |
| TTT测试 |  | ①是否循环:勾选本项,将循环运行TTTTtest点位 ②选择机械单元:选择需要运行的机械单元 ③单机械单元运行:单机械单元运行 ④全部TTTT:②中选择的机械单元运行 |
| 自动标定 |  | ①选择机械单元:选择需要标定的机械单元,双臂和腰腿无法同时选择 ②单机械单元标定:单机械单元标定 ③全部标定:①中选择的机械单元标定,双臂和腰腿无法同时选择 |
底部状态栏

| 序号 | 说明 | |
|---|---|---|
| ① | MovaXHelper软件与机器人的连接状态,点击该按钮可打开于机器人的连接设置页面。 图标信号未满格为未连接;满格信号为已连接;控制器服务未连接状态,无法操作机器人和设置机器人参数。 | |
| ② | 运行速度调整控件,用来调节双臂及腰腿运行时的运动速度,可调范围 1%~100%。JOG速度与随动速度分别独立影响用户控制和外部控制模式的运行速度,加速度为两种模式通用。点击滑条或者-/+按钮,可以微调程序速度(-/+1%)。 | |
| ③ |  | 全部机械单元电机处于下电状态,单击所有机械单元上电。 |
 | 部分机械单元电机处于上电状态,单击所有机械单元下电。 | |
 | 全部机械单元电机处于上电状态,单击所有机械单元下电。 | |
| ④ | 伺服复位按钮,当机器人处于急停或伺服报错状态时,在消除导致以上状态的因素后,点击此按钮可恢复机器人状态。 | |
| ⑤ | 手动保存前60s的诊断数据。 | |
| ⑥ | 用户控制模式下,单击后所有机械单元停止运行,但保持上电状态。 | |
| ⑦ | 臂角开关,默认开启状态;外部控制时建议打开。 | |
| ⑧ | 功能仅在发生碰撞检测时生效,可选择pose和force两种模式,用以清楚碰撞报警。 | |
| ⑨ |  | 用户控制模式,可通过HMI、手柄等操作机器人。 |
 | 外部控制模式,不可通过HMI、手柄等操作机器人。 | |
| ⑩ |  | 当前控制器的状态,连接monitor后自动获取:绿色表示控制器正在运行;红色表示控制器没有运行;白色表示未连接monitor。 |
 | 当前控制器的安全状态:绿色表示安全状态;红色表示非安全状态。 | |
 | 当前机器人运行状态:绿色表示空闲状态;红色表示忙碌状态,机器人在运动中。 | |
 | 当前控制系统的状态:绿色表示正常运动状态;红色表示系统异常。 |
系统监测
点击顶部状态栏状态的“系统监控”按钮,可打开状态监控面板。通过状态监控面板可监控:机器人各关节当前角度、转矩、笛卡尔位姿、收到外力情况及奇异点信息等,方便用户快速了解机器人状态。 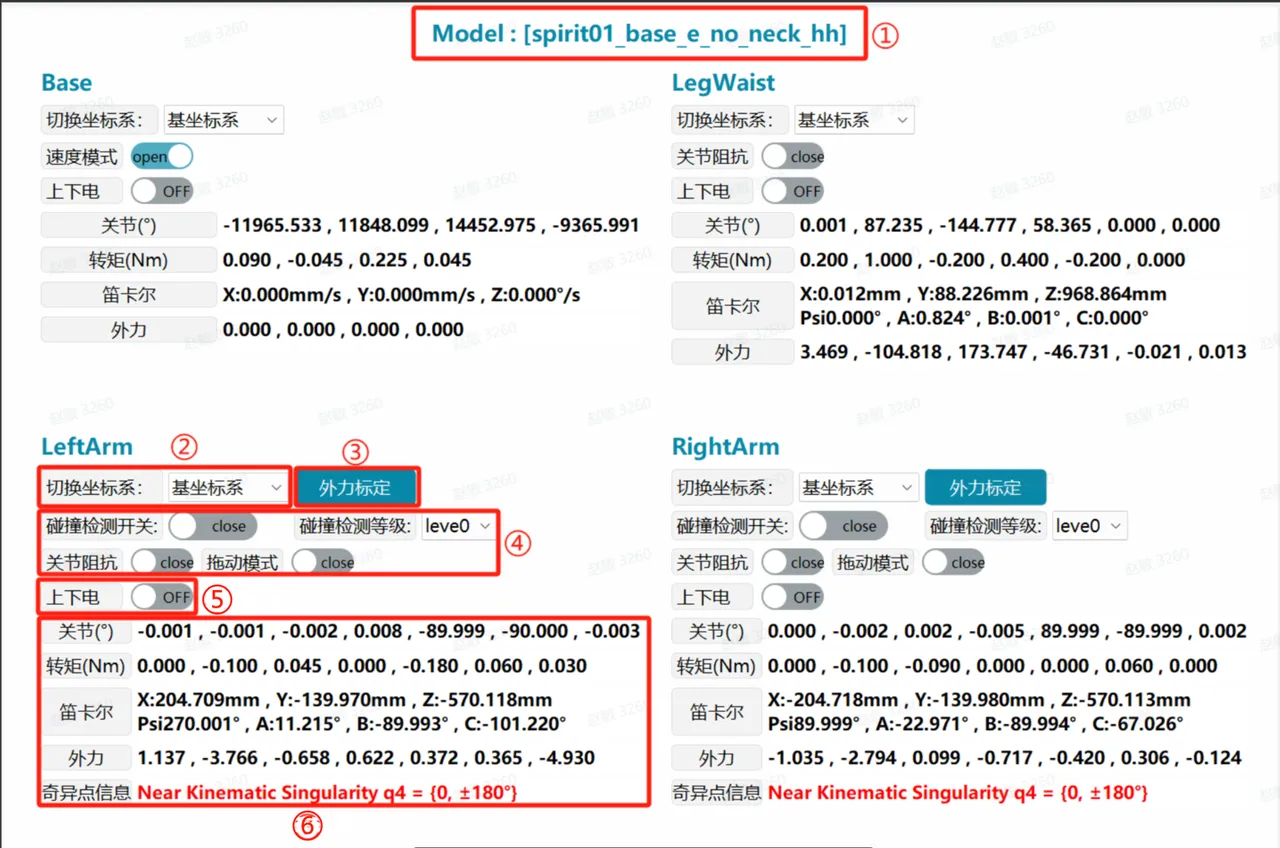
| 序号 | 说明 |
|---|---|
| ① | Model:机器人当前使用的模型。 |
| ② | 切换坐标系:可选择基坐标系与移动平台基坐标系,⑥中笛卡尔示数会随之变化。 |
| ③ | 外力标定:机械单元处于零点位姿时,进行外力标定。 |
| ④ | 力控相关功能。 |
| ⑤ | 上下电:单机械单元上下电开关。 |
| ⑥ | 关节:机械单元各轴当前轴角度。 转矩:机械单元各轴当前转矩。 笛卡尔:机械单元末端相对于当前坐标系下的位置和姿态。 外力:机械单元各轴当前受到外力情况。 奇异点信息:当机器人处于奇异点附近时,红色示警,此时笛卡尔空间运动或会受到影响,某些关节的速度可能会非常快,可能导致报错, 机器人运行中止。 |