机械结构
机械要求
工作环境
本人形机器人设计适用于标准工业与服务场景,其工作环境参数如下:
工作温度:-10℃ ~ 50℃
在极端低温(-10℃以下)或高温(50℃以上)环境下运行,可能导致关节润滑不良、电池性能下降或材料老化。建议在温度超出±5℃范围时,暂停运行并检查设备状态。
工作湿度:≤75% RH(非凝结)
- 高湿度环境(>75% RH)可能导致电子元件受潮、传感器失灵或内部短路。建议在高湿环境下使用防潮密封罩或环境控制装置(如除湿机)。
IP防护等级:IP40
特别提示:
- 机器人不应在雨天、雪天或露天环境下运行,尤其在湿度>80%且有雨水时。
- 若环境湿度长期高于60%,建议每30天进行一次内部干燥与防潮维护。
- 机器人本体及关节部位应避免直接接触水或腐蚀性液体。
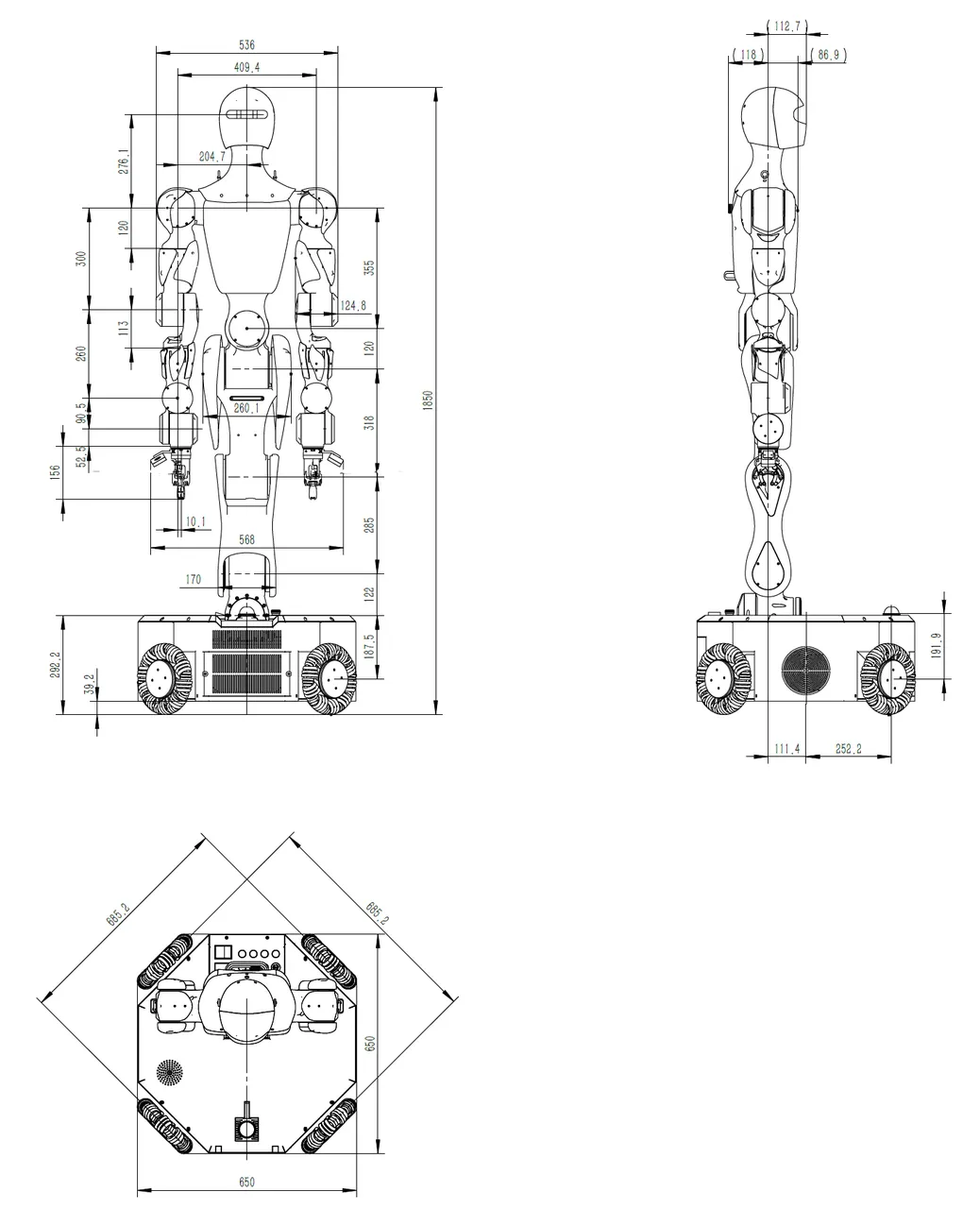
整机尺寸图
整机尺寸如下图:
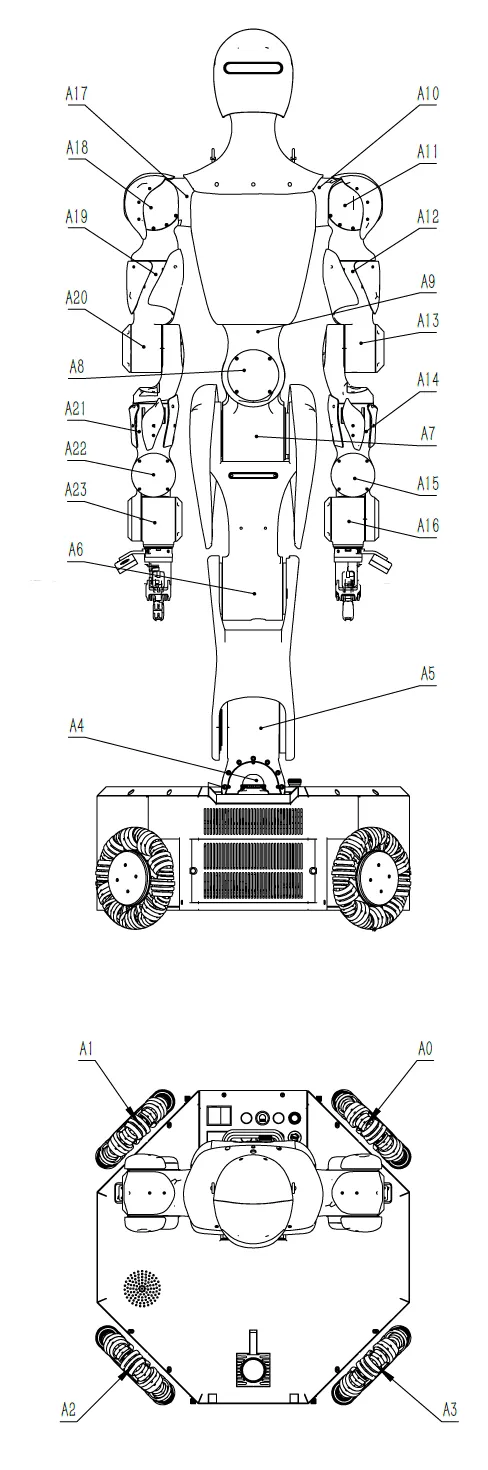
主要部件示意图
Moz1整机上有若干传感器、执行器、接口等,如下图:
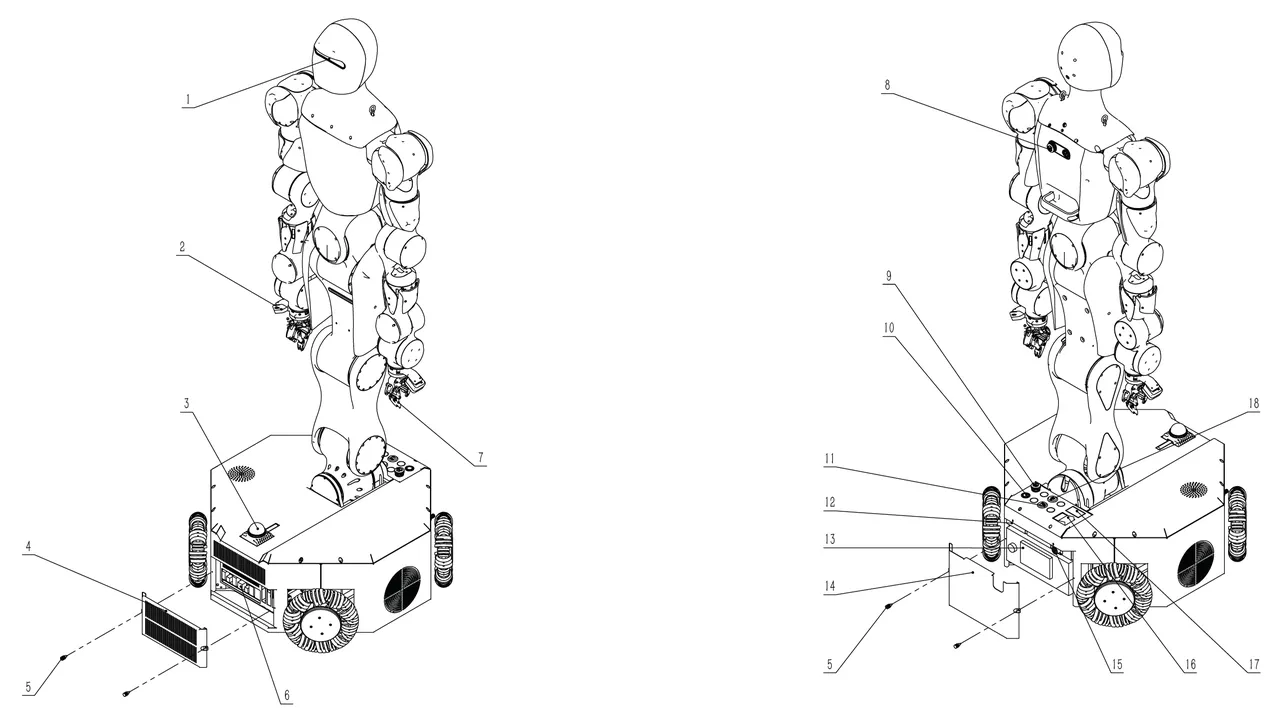
| 部件序号 | 部件名称 | 数量 | 说明 |
|---|---|---|---|
| 1 | 头部相机(Intel D455) | 1 | 用于头部感知 |
| 2 | 腕部相机(Intel D405) | 2 | 用于腕部感知 |
| 3 | 激光雷达(MID-360) | 1 | SLAM |
| 4 | 主机端盖 | 1 | 用于推理主机接口维护 |
| 5 | 手拧钉 | 4 | 用于主机端盖和电池端盖的固定 |
| 6 | 推理主机接口 | 1 x USB 3.2 Gen 2x2 port(s)(1 x USB Type-C(®)) 1 x USB 3.2 Gen 2 port(s) (1 x Type-A) 3x USB 3.2 Gen 1 port(s) (2 x Type-A, 1 x USB Type-C(®)) 4 x USB 2.0 port(s) (4 x Type-A) 1 x HDMI(®) port 1 x DisplayPort 1 x Intel(®) 2.5Gb Ethernet | 头部相机和腕部相机连接 |
| 7 | 二指夹爪 | 2 | 末端执行器 |
| 8 | 背部急停按钮 | 1 | 用于意外情况时整机运动停止 |
| 9 | 移动平台急停按钮 | 1 | 用于意外情况时整机运动停止 |
| 10 | 主机电源按钮 | 1 | 用于主机启动、关闭和强制关闭 |
| 11 | Ethernet | 1 | 用于机器人运动控制器连接 |
| 12 | 电池供电接口 | 1 | 锂电池供电接口 |
| 13 | 锂电池 | 1 | 用于机器人整机供电 |
| 14 | 电池端盖 | 1 | 用于锂电池的固定 |
| 15 | 充电接口航空插头 | 1 | 充电器连接接口 |
| 16 | 空气开关 | 1 | 用于整机的启动、关闭 |
| 17 | 电量指示屏 | 1 | 显示电量信息 |
| 18 | USB3.0 | 1 | 用于机器人运动控制器连接 |
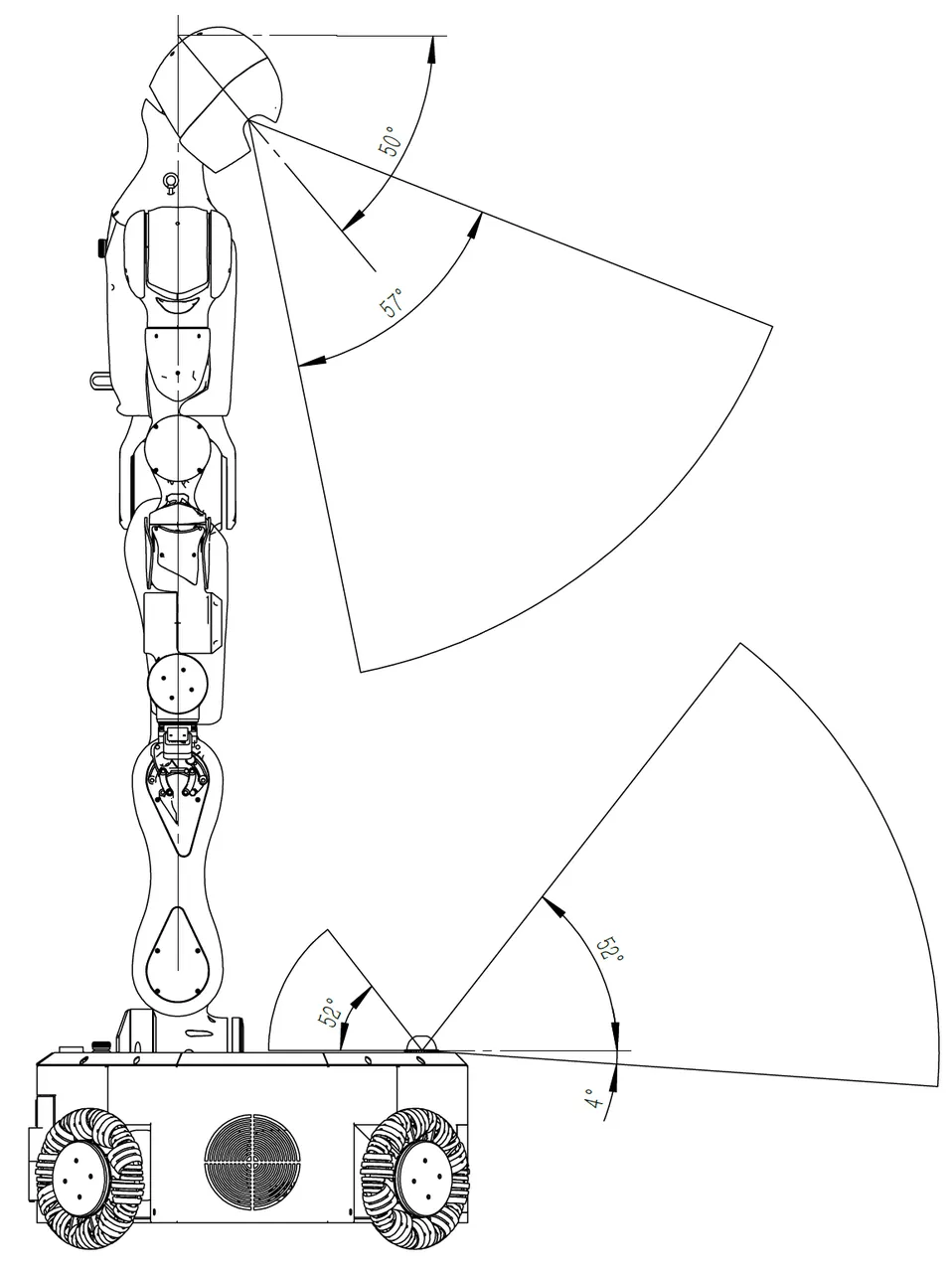
头部相机和雷达视场角
Moz1 头部相机默认和水平方向的夹角为50°,视场范围如下图所示。如需调节头部相机角度,可参照章节头部角度调节。激光雷达水平放置于移动平台上,视场范围如下图所示。
工作范围和速度
Moz1各轴序号及运动范围和速度限制如下:
头部角度调节
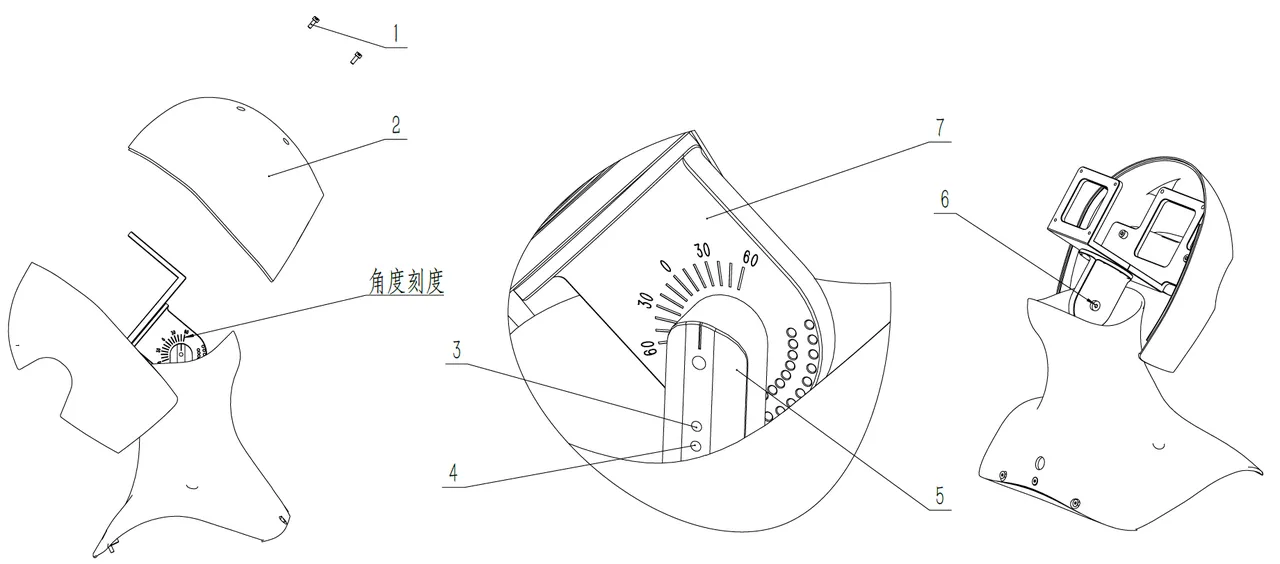
| 序号 | 名称 | 数量 | 功能 |
|---|---|---|---|
| 1 | 内六角圆柱头螺钉M3x8 | 4 | |
| 2 | 头部后壳体 | 1 | |
| 3 | 内六角圆柱端紧定螺钉M3x12 | 1 | 5°、15°、25°、35°、45°、55°调节螺钉 |
| 4 | 内六角圆柱端紧定螺钉M3x12 | 1 | 0°、10°、20°、30°、40°、50°、60°调节螺钉 |
| 5 | 调节支架A | 1 | |
| 6 | 内六角圆柱头轴肩螺钉5x15 | 1 | |
| 7 | 调节支架B | 1 |
出厂时头部角度为50度(如图),如需调节角度可按下面步骤调节:
- 用H2.5内六角扳手拆下4颗内六角圆柱头螺钉M3x4,取下头部后壳体
- 用H3内六角扳手将内六角圆柱头轴肩螺钉5x15松掉1圈
- 用H1.5内六角扳手将内六角圆柱端紧定螺钉M3x12松掉,使调节支架B可以转动(松掉3号或4号,根据拆卸前角度)
- 目视角度刻度,转动调节支架B到目标刻度位
- 用H1.5内六角扳手将内六角圆柱端紧定螺钉M3x12(3号或4号,根据目标角度)旋入,直至调节支架B不能自由转动
- 用H3内六角扳手将内六角圆柱头轴肩螺钉5x15 锁紧
- 用H1.5内六角扳手将内六角圆柱端紧定螺钉M3x12(3号或4号,根据目标角度)锁紧
- 装入头部后壳体,并用H2.5内六角扳手将4颗内六角圆柱头螺钉M3x4 锁紧完成角度调节
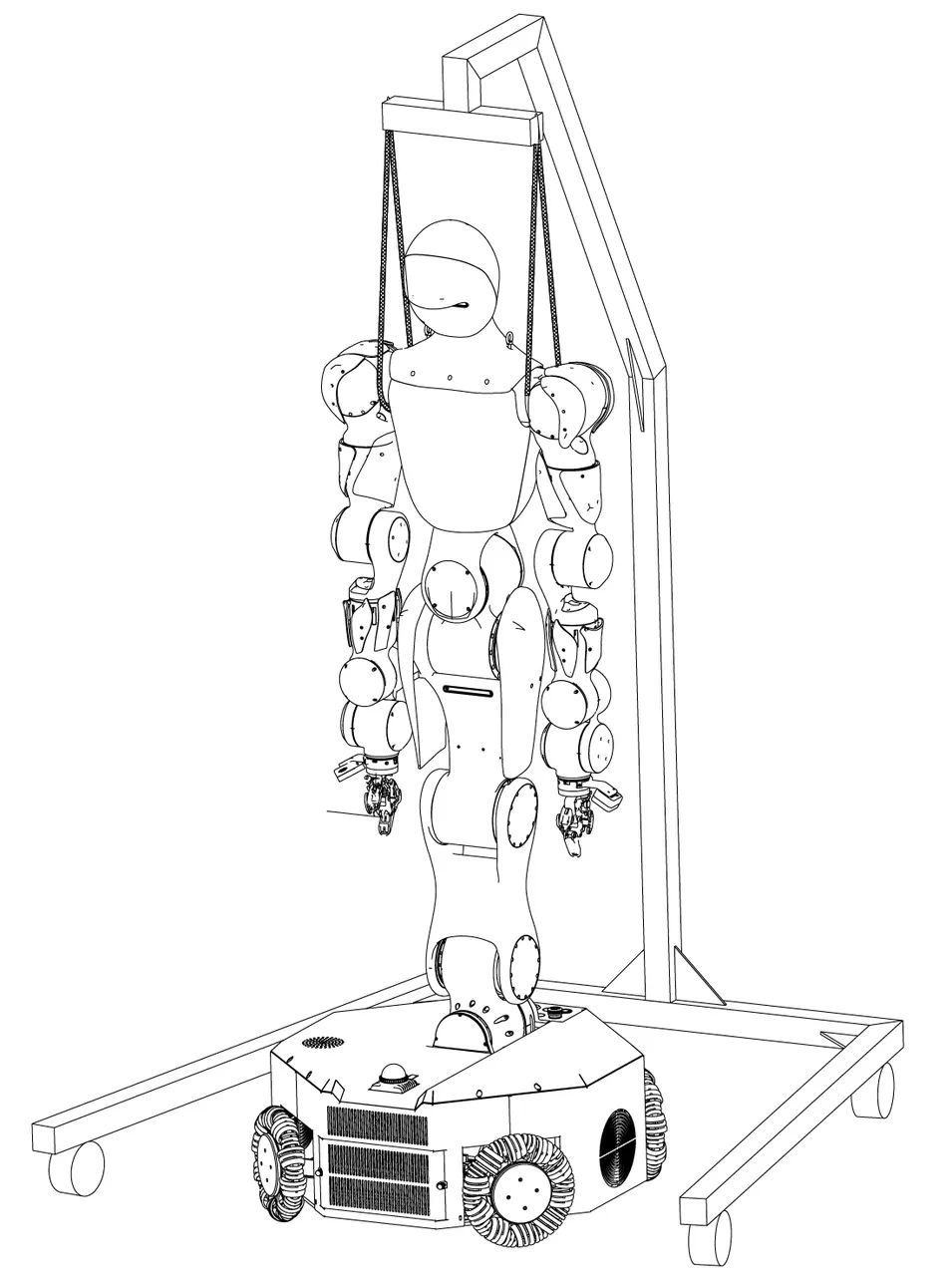
吊装示意
在机器人维护或调试过程中,为了机器人和使用者安全,建议使用吊架对机器人进行保护,吊装示意图如下图: